Hardware
Chip introduction
WK2204(DataSheet) Is a spi extended UART chip, which implements spi extended 4 routes of uart. The expanded UART channel of the chip has the following features:
- The baud rate, word length, and check format of each channel can be set independently, providing a maximum communication rate of 2 Mbps
- Each channel has an independent 256-level FIFO receiving/sending. FIFO interrupts can be triggered programmatically according to user requirements and have timeout interrupt function
- Each channel can independently set up advanced working modes such as IrDA infrared communication, RS485 automatic transceiver control, 9-bit network address automatic identification, software/hardware automatic flow control, etc.
circuit design
_Typical circuit design as shown in the figure:
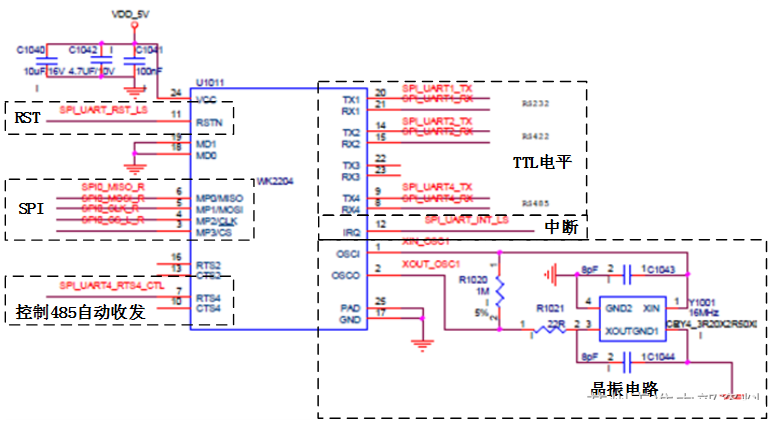
- The pin interruption requires an external pull-up resistance, typically 5.1K. The driver receives and receives data depending on the interrupt signal. If the interrupt signal is abnormal, the subsequence port cannot communicate properly.
- Crystal Vibration Circuit, Requires 1M resistor in parallel with Crystal Vibration
- SPI is connected to the SPI pin of the CPU (Xavier), the sub-serial port outputs TTL level, and the RS signal transceiver is connected
- The RTS pin (only 2/4 of the sub-serial port) is used to control the transceiver/receiver conversion of the RS-485 transceiver in the RS485 automatic transceiver control working mode.
drive
Add Device Tree
- As a SPI slave device, WK2204 SPI bus maximum rate cannot exceed 10M
- INT and RTS are connected to CPU, and these two GPIO resources need to be added to the device tree
- Frequency of Crystal Vibration in Device Tree
_Add the following device tree:
spi@3230000{ // cpu is nvidia-jetson
status = "okay";
spi_test@00 {
compatible = "wkmic, wk2124spi";
reg = <0>;
spi-max-frequency = <10000000>;
irq_gpio = <&tegra_main_gpio TEGRA194_MAIN_GPIO(T, 0) IRQ_TYPE_LEVEL_LOW>;
reset_gpio = <&tegra_main_gpio TEGRA194_MAIN_GPIO(M, 3) GPIO_ACTIVE_HIGH>;
};
};
Add Driver
- WK2204Official Driver Based on the Rockchip platform and the core-3.1 foundation, remove the relevant rockchip code:
-#include <linux/platform_data/spi-rockchip.h>
... ...
//#ifdef CONFIG_OF
-static int rockchip_spi_parse_dt(struct device *dev)
+static int spi_parse_dt(struct device *dev)
... ...
static int wk2xxx_probe(struct spi_device *spi)
{
... ...
+ irq = spi_parse_dt(&spi->dev);
+ if(irq < 0)
+ return 1;
do
{
wk2xxx_read_global_reg(spi,WK2XXX_GENA,dat);
printk(KERN_ERR "wk2xxx_probe() GENA = 0x%X\n",dat[0]); //GENA=0X30
wk2xxx_write_global_reg(spi,WK2XXX_GENA,0xf5);
wk2xxx_read_global_reg(spi,WK2XXX_GENA,dat);
printk(KERN_ERR "wk2xxx_probe() GENA = 0x%X\n",dat[0]); //GENA=0X35
wk2xxx_write_global_reg(spi,WK2XXX_GENA,0xf0);
wk2xxx_read_global_reg(spi,WK2XXX_GENA,dat);
printk(KERN_ERR "wk2xxx_probe() GENA = 0x%X\n",dat[0]); //GENA=0X30
}while(0);
/test spi //
- irq = rockchip_spi_parse_dt(&spi->dev);
- if(irq < 0)
- return 1;
... ...
}
... ...
-static int wk2xxx_resume(struct spi_device *spi)
-{
- #ifdef _DEBUG_WK_FUNCTION
- printk(KERN_ALERT "%s!!--in--\n", __func__);
- #endif
- return 0;
-}
... ...
static struct spi_driver wk2xxx_driver = {
.driver = {
.name = "wk2xxxspi",
.bus = &spi_bus_type,
.owner = THIS_MODULE,
.of_match_table = of_match_ptr(rockchip_spi_wk2xxx_dt_match),
},
.probe = wk2xxx_probe,
.remove = wk2xxx_remove,
- .resume = wk2xxx_resume,
}
- The RST pin level of WK2204 sub-serial port 4 can automatically control the sending and receiving of 485 chips. Official driver defaults to the RST pin pull up, instead of the default pull down:
+#define WK_RS485_FUNCTION
......
static int wk2xxx_startup(struct uart_port *port)//i
{
... ...
#ifdef WK_RS485_FUNCTION
+ // Channel 4 is set to 485 functions
+ if (s->port.iobase == 4) {
- wk2xxx_write_slave_reg(s->spi_wk,s->port.iobase,WK2XXX_RS485,0X02); //default high
+ wk2xxx_write_slave_reg(s->spi_wk,s->port.iobase,WK2XXX_RS485,0X03); //default low
wk2xxx_write_slave_reg(s->spi_wk,s->port.iobase,WK2XXX_SPAGE,1);
wk2xxx_write_slave_reg(s->spi_wk,s->port.iobase,WK2XXX_RRSDLY,0X10);
wk2xxx_write_slave_reg(s->spi_wk,s->port.iobase,WK2XXX_SPAGE,0);
}
#endif
... ...
}
- The baud rate of WK2204 sub-serial port comes from the frequency division of crystal oscillation outside the chip. The official drive adapter is 11.0592 Mhz. Take 16Mhz crystal oscillation as an example, change to:
static void wk2xxx_termios( struct uart_port *port, struct ktermios *termios,
struct ktermios *old)
{
... ...
switch (baud)
{
case 600:
- baud1=0x4;
- baud0=0x7f;
- pres=0;
+ baud1=0x6;
+ baud0=0x81;
+ pres=0xb;
break;
case 1200:
- baud1=0x2;
- baud0=0x3F;
- pres=0;
+ baud1=0x3;
+ baud0=0x40;
+ pres=0x5;
break;
case 2400:
baud1=0x1;
- baud0=0x1f;
- pres=0;
+ baud0=0x9f;
+ pres=0xb;
break;
case 4800:
baud1=0x00;
- baud0=0x8f;
- pres=0;
+ baud0=0xcf;
+ pres=0x5;
break;
case 9600:
baud1=0x00;
- baud0=0x47;
- pres=0;
+ baud0=0x67;
+ pres=0x3;
break;
case 19200:
baud1=0x00;
- baud0=0x23;
- pres=0;
+ baud0=0x33;
+ pres=0x1;
break;
case 38400:
baud1=0x00;
- baud0=0x11;
- pres=0;
+ baud0=0x19;
+ pres=0x1;
break;
case 76800:
baud1=0x00;
- baud0=0x08;
- pres=0;
+ baud0=0x0c;
+ pres=0;
break;
case 1800:
- baud1=0x01;
- baud0=0x7f;
- pres=0;
+ baud1=0x2;
+ baud0=0x2a;
+ pres=0x9;
break;
case 3600:
- baud1=0x00;
- baud0=0xbf;
- pres=0;
+ baud1=0x1;
+ baud0=0x14;
+ pres=0xc;
break;
case 7200:
baud1=0x00;
- baud0=0x5f;
- pres=0;
+ baud0=0x89;
+ pres=0xe;
break;
case 14400:
baud1=0x00;
- baud0=0x2f;
- pres=0;
+ baud0=0x44;
+ pres=0x7;
break;
case 28800:
baud1=0x00;
- baud0=0x17;
- pres=0;
+ baud0=0x21;
+ pres=0xc;
break;
case 57600:
baud1=0x00;
- baud0=0x0b;
- pres=0;
+ baud0=0x10;
+ pres=0x6;
break;
case 115200:
baud1=0x00;
- baud0=0x05;
- pres=0;
+ baud0=0x07;
+ pres=0xb;
break;
case 230400:
baud1=0x00;
- baud0=0x02;
- pres=0;
+ baud0=0x03;
+ pres=0x6;
break;
default:
baud1=0x00;
baud0=0x00;
pres=0;
break;
}
... ...
}
debugging
View boot loads
_Driver loads successfully and generates four serial devices under / dev: ttysWK0, ttysWK1, ttysWK2, ttysWK3. Enter "dmesg | grep wk" or "ls/dev/ttysWK*" to see if the driver loaded successfully, as shown in the diagram:
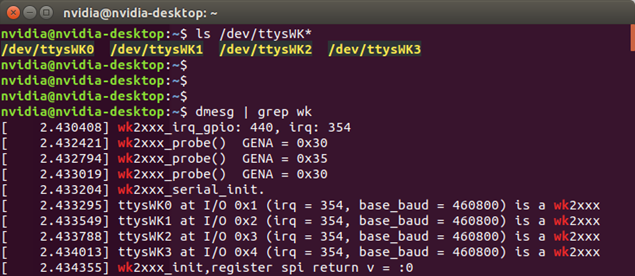
_If the driver loading fails, detect if the RST signal is pulled up before the driver loading.
Check Serial Communication
_Windows System Installation Serial Debugging Assistant; The Ubuntu system recommends using the serial communication tool minicom (Reference) Usage method).
Data is out of order or missing
- Check crystal vibration
- Check harness
- Detect INT signal
- Change debugging tools
RS485 can only be received or not sent
- Whether the driver enables 485 custom transceiver control functions
- Oscilloscope Detecting RTS Signal
System Interrupt Response Exception
_If the system keeps responding to interruptions without data communication, as shown in the figure:
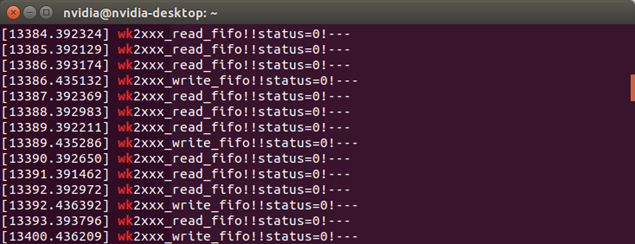
_Check the source of the interrupt to interrupt the DEBUG information (_DEBUG_WK_IRQ) if the register display chip does not issue an interrupt:
- Check the interrupt mode of the driver settings and whether the low level triggers.
- The oscilloscope detects the INT pin level before and after data communication. If it keeps pulling down, check the pull-up resistance value of the connection.
Reflection
_4 routes of uart data receipt are responded to by gpio interruption, which leads to higher CPU usage.