Voice communication scheme
System level solutions and self built protocols
windows platform, linux platform, embedded linux platform, mcu platform
1. Voice solution of wired communication developed on Embedded Linux
This scheme is developed on Embedded Linux. The audio scheme is based on ALSA. The voice communication is related to user space. It is a top-level solution. Due to the wired communication, the network environment is not particularly bad compared with the wireless communication, and there are not many packet loss compensation measures, mainly PLC, RFC2198, etc.
2. Voice solution for traditional wireless communication developed on Android mobile phone
This scheme is developed on Android mobile phone, which is a traditional voice communication scheme on mobile phone (relative to APP voice communication). Android is based on Linux, so ALSA will also be used, but mainly for control, such as the configuration of codec chip. The driver, codec, pre-processing and post-processing related to audio data are developed on Audio DSP, and the network side is developed on CP (communication processor), which is a bottom-level solution. The software block diagram of the scheme is as follows:
System level
Sound card is also called audio frequency The sound effect card is the most basic part of the computer multimedia system. It is the realization of acoustic wave/digital signal A kind of mutual conversion Hardware . The basic function of sound card is to Microphone , tape, optical raw sound signal To convert, output to Headset,speaker,an amplifier,recorder Equivocal equipment , or by Music Equipment digital interface( MIDI )To produce the sound of a synthetic instrument
All computer motherboards basically have integrated sound cards. If there is a professional requirement, you will buy another independent sound card, just like a professional player who buys an independent video card and a manual dog head
Sound card drive
For audio processing technology, there are mainly the following:
- Collect microphone input
- Acquisition sound card output
- Send audio data to sound card for playing
- Mix multiple audio inputs
Calling sound card API provided by Windows Platform Kernel
1, MME (MultiMedia Extensions)
MME is the interface provided by winmm.dll and the first generation API under Windows platform. The advantage is that it is simple to use and can meet the business requirements in general scenarios. The disadvantage is that it has high latency and some advanced functions cannot be realized.
Two. XAudio2
Also part of DirextX, to replace DirectSound. The audio components in the DirextX suite are mostly used in games and support hardware acceleration, so they have lower latency than MME.
Three. Core Audio API
Vista system began to introduce a new architecture. It is an interface provided by COM. In user mode, it is at the bottom. Several API s mentioned above will eventually use it! It has the strongest function and the best performance, but the interface is complex and cumbersome to use.
Four. Wasapi will do (high performance, but more complex)
The Wave series API functions are mainly used to collect the microphone input (using the Wave in series API functions) and control the sound playback (using the post Wave out series functions).
1. Use WaveIn series API functions to realize microphone input collection
API functions involved:
-
waveInOpen
Open the audio collection device, and the device handle will be returned after success. The handle needs to be used by subsequent API s
The calling module needs to provide a callback function (waveInProc) to receive the collected audio data
-
waveInClose
Turn off the audio acquisition module
After success, the device handle returned by waveInOpen will no longer be valid
-
waveInPrepareHeader
Prepare space for audio collection data cache
-
waveInUnprepareHeader
Clear the data cache of audio collection
-
waveInAddBuffer
Provide the prepared audio data cache to the audio collection device
waveInPrepareHeader needs to be called before calling the API
-
waveInStart
Control the audio acquisition equipment to start the acquisition of audio data
-
waveInStop
Control the audio acquisition equipment to stop the acquisition of audio data
After the audio collection device collects the audio data, it will call the callback function set in waveInOpen.
The parameters include a message type, according to which corresponding operations can be performed.
If the WIM data message is received, it indicates that new audio data has been collected, so that these audio data can be processed as required.
(to be added later)
2. Use Core Audio to capture the output of sound card
The interfaces involved are:
-
IMMDeviceEnumerator
-
IMMDevice
-
IAudioClient
-
IAudioCaptureClient
Main process:
-
Create a Multimedia Device Enumerator
-
Obtain the sound card interface (IMMDevice) through the Multimedia Device Enumerator
-
Obtain the audio client interface (IAudioClient) through the audio interface
-
Through the iaudioclient, we can obtain the audio parameters of the output of the sound card, initialize the sound card, obtain the size of the output buffer of the sound card, and start / stop the collection of the output of the sound card
-
Through the audio capture client interface (IAudio capture client), the output data of the audio card can be acquired and the internal buffer can be controlled
(to be added later)
3. Common mixing algorithms
The mixing algorithm is to calculate the multi-channel audio input signal according to some rules (the multi-channel audio signal is added and then limited), to get a mixed audio, and take this as the output process.
I have also done this work. I have searched the following basic mixing algorithms:
-
Add multiple audio input signals directly and take sum as output
-
Add multiple audio input signals directly and divide by the number of mixing channels to prevent overflow
-
Add the multiple audio input signals directly to get the sum, and then perform the Clip operation (limit the data between the maximum value and the minimum value). If there is any overflow, set the maximum value
-
After the multi-channel audio input signals are added and summed directly, they are saturated and distorted when they are close to the maximum value
-
After adding and summing the multiple audio input signals directly, normalize them and multiply all the coefficients to normalize the amplitude
-
The attenuation factor is used to limit the amplitude after the sum of multiple audio input signals is added directly
Linux platform kernel provides calling sound card API
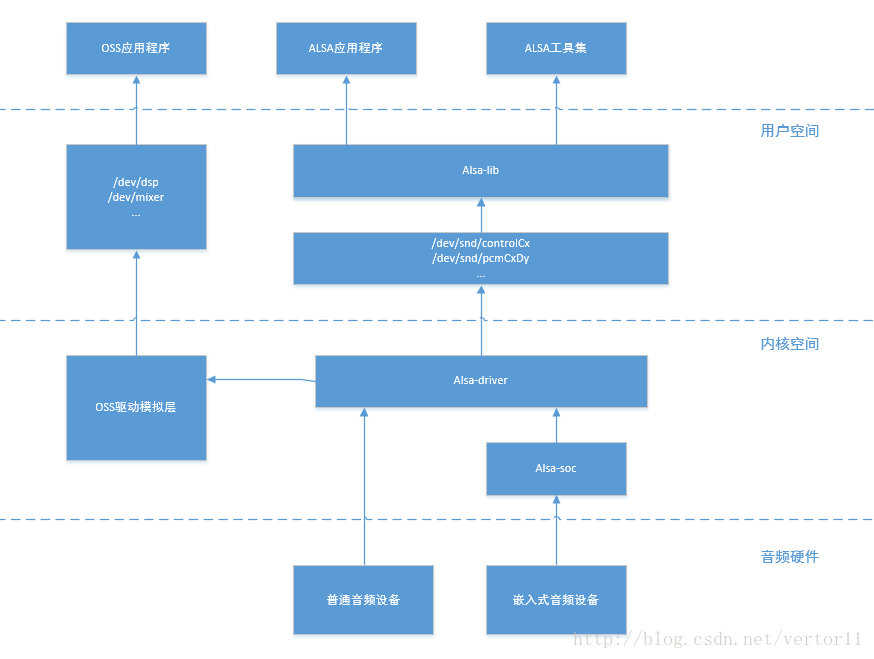
ALSA is the mainstream Audio Architecture of linux
Is an open source project with community maintenance: http://www.alsa-project.org/
include:
1. Kernel driver package alsa driver
2. User space library alsa Lib
3. Add in Library plug-in package alsa libplugins
4. Audio processing toolset alsa utils
5. Other audio processing tools package alsa tools
6. Special audio firmware support package alsa firmware
7. Python binding package pyalsa Lib
8.OSS interface compatibility package alsa OSS
9. In kernel space, alsa SOC is actually a further encapsulation of alsa driver. It provides some column enhanced functions for embedded devices.
1. Operating instructions
install
sudo apt install libasound2-dev
Technological process
- open device
- Allocate parameter memory
- Fill in default parameters
- Set parameters (see for details ALSA - PCM interface)
- Number of channels
- Sampling rate (code rate, used to specify time and file size, frames/s)
- Number of frames (the length of data read per time is related to this parameter)
- Data format (affects output data, cache size)
- Device access type (direct read / write, memory mapping, interleaved mode, non interleaved mode)
- Read and write data
A simple example
Include header file
#include <alsa/asoundlib.h>
Check the device and determine the device name according to the last two numbers. Usually, default is OK
aplay -L
Define the relevant parameters, and record and play the sound through the same steps, and define them together
// The device name, which is the default, can also select "hw:0,0","plughw:0,0", etc const char *device = "default"; // device handle // There are two definitions below. They are distinguished according to the prefix. C - > capture, P - > playback. The representation parameters without a prefix are the same snd_pcm_t *chandle; snd_pcm_t *phandle; // Hardware parameters snd_pcm_hw_params_t *cparams; snd_pcm_hw_params_t *pparams; // Data access type, read-write mode: memory mapping or read-write, snd? PCM? Access? T access? Type= SND_PCM_ACCESS_RW_INTERLEAVED; // Format, snd? PCM? Format? T format= SND_PCM_FORMAT_S16_LE; // Code rate, sampling rate, 8000Hz,44100Hz unsigned int rate = 44100; // Channel number unsigned int channels = 2; // The number of frames is 32 snd ﹣ PCM ﹣ uframes ﹣ t frames = 32; // The following is the optional parameter unsigned int bytes_per_frame; // Software resampled unsigned int soft_resample;
open device
snd_pcm_open(&chandle, device, SND_PCM_STREAM_CAPTURE, 0); snd_pcm_open(&phandle, device, SND_PCM_STREAM_PLAYBACK, 0);
Add a wrong judgment
int err; if ((err = snd_pcm_open(&chandle, device, SND_PCM_STREAM_CAPTURE, 0)) < 0) { std::cout << "Capture device open failed."; } if ((err = snd_pcm_open(&phandle, device, SND_PCM_STREAM_PLAYBACK, 0)) < 0) { std::cout << "Playback device open failed."; }
Set the parameters, and the error judgment will not be added here, otherwise it will be a little long
// First, calculate the size of each frame of data bytes_per_frame = snd_pcm_format_width(format) / 8 * 2; // Calculate the size of the cache space that needs to be allocated buffer_size = frames * bytes_per_frame; // Allocate space for parameters snd_pcm_hw_params_alloca(¶ms); // Fill parameter space snd_pcm_hw_params_any(handle, params); // Set data access method snd_pcm_hw_params_set_access(handle, params, access_type); // Set format (handle, params, format); // Set snd? PCM? HW? Params? Set? Channels (handle, params, channels); // Set the sampling rate snd? PCM? HW? Params? Set? Rate? Near (handle, params, & rate, 0); // Optional, unchanged / / set buffer size = period size * 2; snd_pcm_hw_params_set_buffer_size_near(handle, params, &buffer_size); // Set the segment size. period is similar to segment in OSS. period = buffer size / 2; snd_pcm_hw_params_set_period_size_near(handle, params, &period_size, 0)); //Set the parameter snd? PCM? HW? Params (handle, params);
Read and write data
// Allocate cache space. The size is calculated by buffer_size char *buffer = (char *)malloc(buffer_size); // Read and write data snd_pcm_readi(chandle, buffer, frames); snd_pcm_writei(phandle, buffer, frames);
Loop Playback
while(1) { snd_pcm_readi(chandle, buffer, frames); snd_pcm_writei(phandle, buffer, frames); }
Capture audio data to the file stream for a certain period of time
ofstream output("test.pcm", ios::trunc); int loop_sec; int frames_readed; loop_sec = 10; unsigned long loop_limit; // Calculate loop? Limit = loop? Sec* rate; for (size_t i = 0; i < loop_limit; ) { // It is also necessary to determine whether the return value is negative frames ﹣ read= snd_pcm_readi(chandle, buffer, frames); output.write(buffer, buffer_size); i += frames_readed; }
Shut down device, release pointer
snd_pcm_close(chandle); snd_pcm_close(phandle); free(buffer);
During playback, there may be a "Broken pipe" error. Add the following to prepare the device again
err = snd_pcm_writei(handle, input_buffer, frames); if (err == -EPIPE) { snd_pcm_prepare(handle); continue; // perhaps // return 0; }
Complete example


1 #ifndef ALSA_AUDIO_H 2 #define ALSA_AUDIO_H 3 4 #include <QObject> 5 6 #include <alsa/asoundlib.h> 7 8 class ALSA_Audio : public QObject 9 { 10 Q_OBJECT 11 public: 12 explicit ALSA_Audio(QObject *parent = nullptr); 13 14 15 void capture_start(); 16 void capture_stop(); 17 /** 18 * @brief Read audio data 19 * @param buffer Audio data 20 * @param buffer_size Audio data size 21 * @param frames Number of audio frames read 22 * @return 0 Success, - 1 Failure 23 */ 24 int audio_read(char **buffer, int *buffer_size, unsigned long *frames); 25 26 void playback_start(); 27 void playback_stop(); 28 /** 29 * @brief audio_write Play audio 30 * @param buffer Audio data 31 * @param frames Number of audio frames played 32 * @return 0 Success, - 1 Failure 33 */ 34 int audio_write(char *buffer); 35 36 37 38 private: 39 bool m_is_capture_start; 40 snd_pcm_t *m_capture_pcm; 41 char *m_capture_buffer; 42 unsigned long m_capture_buffer_size; 43 snd_pcm_uframes_t m_capture_frames; // Frames read at a time 44 45 46 bool m_is_playback_start; 47 snd_pcm_t *m_playback_pcm; 48 snd_pcm_uframes_t m_playback_frames; // Frames written at a time 49 50 /** 51 * @brief ALSA_Audio::set_hw_params 52 * @param pcm 53 * @param hw_params 54 * @param rate sampling frequency 55 * @param format format 56 * @param channels Number of channels 57 * @param frames Number of frames read and write at a time 58 * @return 59 */ 60 int set_hw_params(snd_pcm_t *pcm, unsigned int rate, snd_pcm_format_t format, unsigned int channels, snd_pcm_uframes_t frames); 61 62 63 64 signals: 65 66 public slots: 67 }; 68 69 #endif // ALSA_AUDIO_H
1 #include "alsa_audio.h" 2 #include "global.h" 3 4 #include <QDebug> 5 6 #include <math.h> 7 #include <inttypes.h> 8 9 10 11 ALSA_Audio::ALSA_Audio(QObject *parent) : QObject(parent) 12 { 13 m_is_capture_start = false; 14 m_is_playback_start = false; 15 } 16 17 18 19 int ALSA_Audio::set_hw_params(snd_pcm_t *pcm, unsigned int rate, snd_pcm_format_t format, unsigned int channels, snd_pcm_uframes_t frames) 20 { 21 snd_pcm_uframes_t period_size; // The number of frames needed in a processing cycle 22 snd_pcm_uframes_t hw_buffer_size; // Hardware buffer size 23 snd_pcm_hw_params_t *hw_params; 24 int ret; 25 int dir = 0; 26 27 28 29 // Initialize hardware parameter structure 30 snd_pcm_hw_params_malloc(&hw_params); 31 // Set default hardware parameters 32 snd_pcm_hw_params_any(pcm, hw_params); 33 34 // The following are the required hardware parameters for setting 35 36 // Set audio data recording method 37 CHECK_RETURN(snd_pcm_hw_params_set_access(pcm, hw_params, SND_PCM_ACCESS_RW_INTERLEAVED)); 38 // Format. Use 16 bit sample size, small end mode( SND_PCM_FORMAT_S16_LE) 39 CHECK_RETURN(snd_pcm_hw_params_set_format(pcm, hw_params, format)); 40 // Set the number of audio channels 41 CHECK_RETURN(snd_pcm_hw_params_set_channels(pcm, hw_params, channels)); 42 // Sampling frequency, one frame data at a time 43 //CHECK_RETURN(snd_pcm_hw_params_set_rate_near(pcm, hw_params, &rate, &dir)); // Set similar values 44 CHECK_RETURN(snd_pcm_hw_params_set_rate(pcm, hw_params, rate, dir)); 45 // The number of frames needed in a processing cycle 46 period_size = frames * 5; 47 CHECK_RETURN(snd_pcm_hw_params_set_period_size_near(pcm, hw_params, &period_size, &dir)); // Set similar values 48 // // Hardware buffer size, Units: frame( frame) 49 // hw_buffer_size = period_size * 16; 50 // CHECK_RETURN(snd_pcm_hw_params_set_buffer_size_near(pcm, hw_params, &hw_buffer_size)); 51 52 // Write parameters to pcm drive 53 CHECK_RETURN(snd_pcm_hw_params(pcm, hw_params)); 54 55 snd_pcm_hw_params_free(hw_params); // Release what is no longer in use hw_params space 56 57 printf("one frames=%ldbytes\n", snd_pcm_frames_to_bytes(pcm, 1)); 58 unsigned int val; 59 snd_pcm_hw_params_get_channels(hw_params, &val); 60 printf("channels=%d\n", val); 61 62 if (ret < 0) { 63 printf("error: unable to set hw parameters: %s\n", snd_strerror(ret)); 64 return -1; 65 } 66 return 0; 67 } 68 69 70 void ALSA_Audio::capture_start() 71 { 72 m_capture_frames = 160; // Here 160 is a fixed value, which is used for both sending and receiving 73 unsigned int rate = 8000; // sampling frequency 74 snd_pcm_format_t format = SND_PCM_FORMAT_S16_LE; // Use 16 bit sample size, small end mode 75 unsigned int channels = 1; // Number of channels 76 int ret; 77 78 if(m_is_capture_start) 79 { 80 printf("error: alsa audio capture is started!\n"); 81 return; 82 } 83 84 ret = snd_pcm_open(&m_capture_pcm, "plughw:1,0", SND_PCM_STREAM_CAPTURE, 0); // Use plughw:0,0 85 if(ret < 0) 86 { 87 printf("snd_pcm_open error: %s\n", snd_strerror(ret)); 88 return; 89 } 90 91 // Set hardware parameters 92 if(set_hw_params(m_capture_pcm, rate, format, channels, m_capture_frames) < 0) 93 { 94 return; 95 } 96 97 // Use buffer Save the data from one-time processing 98 m_capture_buffer_size = m_capture_frames * static_cast<unsigned long>(snd_pcm_format_width(format) / 8 * static_cast<int>(channels)); 99 m_capture_buffer_size *= 5; // * 5 Indicates that 5 times of cache space is used 100 printf("snd_pcm_format_width(format):%d\n", snd_pcm_format_width(format)); 101 printf("m_capture_buffer_size:%ld\n", m_capture_buffer_size); 102 m_capture_buffer = static_cast<char *>(malloc(sizeof(char) * m_capture_buffer_size)); 103 memset(m_capture_buffer, 0, m_capture_buffer_size); 104 105 // Get the time required for one processing, unit us 106 // 1/rate * frames * 10^6 = period_time, That is, the time required to acquire a frame * Number of frames required for one processing * 10^6 = Time required for one processing (unit us) 107 // snd_pcm_hw_params_get_period_time(m_capture_hw_params, &m_period_time, &dir); 108 109 m_is_capture_start = true; 110 } 111 112 void ALSA_Audio::capture_stop() 113 { 114 if(m_is_capture_start == false) 115 { 116 printf("error: alsa audio capture is not start!"); 117 return; 118 } 119 120 m_is_capture_start = false; 121 122 snd_pcm_drain(m_capture_pcm); 123 snd_pcm_close(m_capture_pcm); 124 free(m_capture_buffer); 125 } 126 127 int ALSA_Audio::audio_read(char **buffer, int *buffer_size, unsigned long *frames) 128 { 129 int ret; 130 if(m_is_capture_start == false) 131 { 132 printf("error: alsa audio capture is stopped!\n"); 133 return -1; 134 } 135 memset(m_capture_buffer, 0, m_capture_buffer_size); 136 ret = static_cast<int>(snd_pcm_readi(m_capture_pcm, m_capture_buffer, m_capture_frames)); 137 printf("strlen(m_capture_buffer)=%ld\n", strlen(m_capture_buffer)); 138 if (ret == -EPIPE) 139 { 140 /* EPIPE means overrun */ 141 printf("overrun occurred\n"); 142 snd_pcm_prepare(m_capture_pcm); 143 } 144 else if (ret < 0) 145 { 146 printf("error from read: %s\n", snd_strerror(ret)); 147 } 148 else if (ret != static_cast<int>(m_capture_frames)) 149 { 150 printf("short read, read %d frames\n", ret); 151 } 152 153 if(m_capture_buffer == nullptr) 154 { 155 printf("error: alsa audio capture_buffer is empty!\n"); 156 return -1; 157 } 158 *buffer = m_capture_buffer; 159 *buffer_size = static_cast<int>(m_capture_buffer_size / 5); 160 *frames = m_capture_frames; 161 162 return 0; 163 } 164 165 166 167 void ALSA_Audio::playback_start() 168 { 169 m_playback_frames = 160; // Here 160 is a fixed value, which is used for both sending and receiving 170 unsigned int rate = 8000; // sampling frequency 171 snd_pcm_format_t format = SND_PCM_FORMAT_S16_LE; // Use 16 bit sample size, small end mode 172 unsigned int channels = 1; // Number of channels 173 int ret; 174 175 176 if(m_is_playback_start) 177 { 178 printf("error: alsa audio playback is started!\n"); 179 return; 180 } 181 182 ret = snd_pcm_open(&m_playback_pcm, "plughw:1,0", SND_PCM_STREAM_PLAYBACK, 0); // Use plughw:0,0 183 if(ret < 0) 184 { 185 printf("snd_pcm_open error: %s\n", snd_strerror(ret)); 186 return; 187 } 188 189 // Set hardware parameters 190 if(set_hw_params(m_playback_pcm, rate, format, channels, m_playback_frames) < 0) 191 { 192 return; 193 } 194 195 196 m_is_playback_start = true; 197 198 } 199 200 void ALSA_Audio::playback_stop() 201 { 202 if(m_is_playback_start == false) 203 { 204 printf("error: alsa audio playback is not start!"); 205 return; 206 } 207 208 m_is_playback_start = false; 209 210 snd_pcm_drain(m_playback_pcm); 211 snd_pcm_close(m_playback_pcm); 212 } 213 214 215 int ALSA_Audio::audio_write(char *buffer) 216 { 217 long ret; 218 if(m_is_playback_start == false) 219 { 220 printf("error: alsa audio playback is stopped!\n"); 221 return -1; 222 } 223 else 224 { 225 ret = snd_pcm_writei(m_playback_pcm, buffer, m_playback_frames); 226 if(ret == -EPIPE) 227 { 228 /* EPIPE means underrun */ 229 printf("underrun occurred\n"); 230 snd_pcm_prepare(m_playback_pcm); 231 } 232 else if (ret < 0) 233 { 234 printf("error from write: %s\n", snd_strerror(static_cast<int>(ret))); 235 } 236 else if (ret != static_cast<long>(m_playback_frames)) 237 { 238 printf("short write, write %ld frames\n", ret); 239 } 240 } 241 return 0; 242 }
2. Architecture
Hardware architecture:
Software architecture:
3. Initial understanding of alsa equipment

Note:
controlC0: control interface, used to control the sound card, such as channel selection, mixing, microphone input gain adjustment, etc.
midiC0D0: Raw midi interface for playing midi audio.
pcm c0d0c: pcm interface, pcm device for recording.
pcmC0D0p: pcm device for playback.
pcmC0D1p:
seq: sequencer interface.
Timer: timer interface.
That is to say, seven devices are attached to the sound card. According to the actual capacity of the sound card, the driver can actually Mount more kinds of devices
among
C0D0 represents device 0 in sound card 0.
pcmC0D0c: the last C represents capture.
pcmC0D0p: the last P represents playback.
Equipment type include/sound/core.h:
include/sound/core.h
4. Audio driver code distribution in Linux kernel
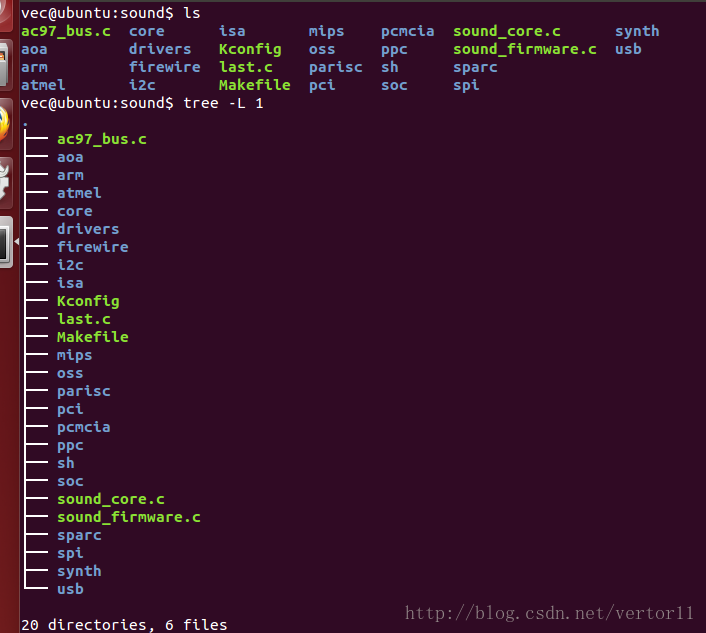
Among them:
Core: contains the core layer code implementation driven by ALSA.
core/oss: contains PCM and Mixer modules that simulate the old OSS architecture.
core/seq: code related to sequencer.
drivers: store some common code unrelated to CPU and bus architecture.
i2c: the i2c control code of ALSA.
PCI: the top-level directory of PCI bus sound card. Its subdirectories contain various PCI sound card codes.
Isa: top level directory of ISA bus sound card, and its subdirectories contain various isa sound card codes.
soc: ASoC(ALSA System on Chip) layer implementation code for embedded audio devices.
soc/codecs: Driver implementation of various audio encoders for ASoC system, independent of the platform.
include/sound: the directory of the ALSA driven common header file.
5. Drive classification
OSS audio device driver:
There are two basic audio devices in OSS standard: mixer and dsp.
ALSA audio device driver:
Although OSS is very mature, it is a commercial product without full open source code after all, and it has basically lost the update in Linux mainline. ALSA (Advanced Linux Sound Architecture) just makes up for this gap. It conforms to GPL and is another alternative sound card driver architecture for audio programming under Linux. ALSA not only provides a set of kernel driver modules like OSS, but also provides corresponding function library for simplifying application programming. Compared with the ioctl based original programming interface provided by OSS, ALSA function library is more convenient to use. The main features of ALSA are as follows. Support a variety of sound card devices.
Modular kernel driver.
Support for SMP and multithreading.
Provide application development function library (alsa LIB) to simplify application development.
It supports OSS API and is compatible with OSS applications.
ASoC audio device driver:
ASoC (ALSA System on Chip) is the development and evolution of ALSA in SoC, which still belongs to
ALSA, but on the basis of ALSA architecture, CPU related code and Codec related code are separated. The reason is that with the traditional ALSA architecture, Codec of the same model needs different drivers when working in different CPUs, which does not meet the requirements of code reuse. For the current development of sound card driver on embedded system, we suggest that readers try to adopt the ASoC framework, which is mainly composed of three parts.
Codec drive. This part only cares about codec itself, and features related to CPU platform are not operated by this part.
Platform driven. This part only concerns CPU itself, not Codec. It mainly deals with two problems: DMA engine and SoC integrated PCM, I2S or AC '97 digital interface control.
Board drive (also known as machine drive). In this part, platform driver and Codec driver are bound together to describe the hardware characteristics at board level.
In the above three parts, 1 and 2 can still be general drivers, that is to say, Codec drivers think that they can connect to any CPU, while platform drivers corresponding to I2S, PCM or AC '97 interfaces of CPU think that they can connect to any Codec that conforms to their interface type, only 3 is not general, and specific CPU and Codec on specific circuit board OK, so it's very much like a socket, with Codec and platform on it. Above the above three parts is the ASoC core layer, which is implemented by sound/soc/soc-core.c in the kernel source code. Looking at its source code, it is found that it is completely a traditional ALSA driver. Therefore, for the sound card driver based on the ASoC architecture, ALSA lib and a series of ALSA utilities are still available. For example, amixer and aplay do not need to make any changes to ASoC. The user programming method of ASoC is the same as ALSA. The Documentation/sound/alsa/soc / directory of kernel source code contains documents related to ASoC.
Android platform kernel provides calling sound card API
At present, the mainstream Audio Architecture in linux is ALSA (Advanced Linux Sound Architecture). ALSA provides ALSA driver in the kernel driver layer and ALSA Lib in the application layer. The application program only needs to call the API provided by ALSA lib (libtinyalsa.so)
Operations on the underlying hardware in pairs. That's good, but Android doesn't use the standard ALSA, but a simplified version of ALSA called tinyalsa. In Android, tinyalsa is used to control and manage all modes of audio channels. We can also use the tools provided by tinyalsa to view
Debugging.
tinycap.c implementation of recording related code tinycap
Tinyplay.c implementation of playback related code
Pcm.c and alsa driver call interface of driver layer, providing api interface for audio · HW
Tinymix viewing and setting up mixer tinymix
Tinypcminfo.c view sound card information
Audio and video are very different. Each frame of video is an image. From the above sine wave, we can see that the audio data is streaming, and there is no clear concept of a frame. In the actual application, for the convenience of audio algorithm processing / transmission, it is generally agreed that the data amount of 2.5ms~60ms is taken as a frame of audio.
This time is called "sampling time". There is no special standard for its length. It is determined according to the needs of codec and specific application. We can calculate the size of a frame of audio frame:
Assuming that an audio signal has a sampling rate of 8kHz, dual channels, a bit width of 16bit and a frame of 20ms, the size of one frame of audio data is:
int size = 8000 x 2 x 16bit x 0.02s = 5120bit = 640 byte
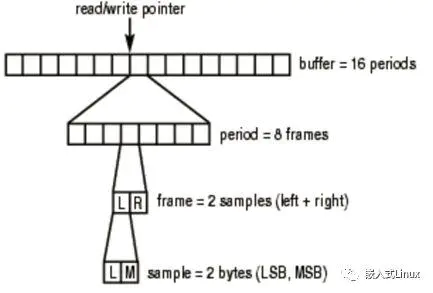
Audio frame summary
Period: the interval between hardware interrupts. It represents the input delay.
There is a pointer in the sound card interface to indicate the current read / write position in the sound card hardware cache. As long as the interface is running, the pointer will loop to a location in the cache.
frame size =sizeof(one sample) * nChannels
The buffer and period size configured in alsa are stored as frames in runtime.
Period ﹣ bytes = PCM ﹣ format ﹣ to ﹣ bits is used to calculate how many bits a frame has. It is often used in practical application
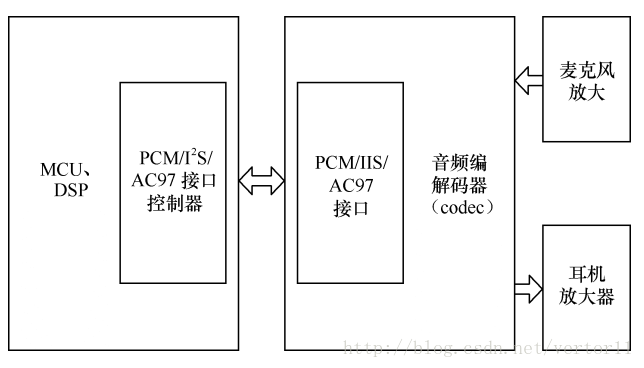
Embedded hardware level
Circuit composition
Simple process:
MIC collects natural sound and converts it into analog electrical signal, amplifies the signal amplitude by operation and amplification circuit, and then converts it into digital signal by ADC, (audio coding can be done, such as mp3), (audio decoding can be done), (analog signal can be converted by DAC) (or pulse width modulation PWM can be used to digitally code the level of analog signal), and The power amplifier is amplified and then output to the horn
See what scheme, if it involves more complex calculation, the calculation power of MCU is far from enough, it must be embedded hardware, which involves the development of system level. If it's just simple audio processing, it's OK (such as MP3 rhythm color lamp recording and playing, etc.)
Other options:
Using language integrated chips such as: ISD2560, ISD2560 adopts multi-level direct analog storage technology, which can reproduce voice, music, tone and effect sound in a very real and natural way, recording time is 60s, and can record and play 100000 times repeatedly.
2 PWM+SPI PWM analog clock timing, SPI transmission data, PCM coding, and then connected to amplifier + horn;
(the software is very simple, just throw the sampling value of wave file into pwm. Of course, the pwm signal generally needs to be added with filter circuit to send to power amplifier and horn. Generally, 16kbps sampling rate is adopted, and the filter circuit will be simple.)
3 DAC + amplifier + speaker, the general voice chip is made in this way, but it should be a special DAC voice chip;
4 IIS + voice decoding chip
These bus protocols, such as I2C SPI, are used to connect peripheral integrated circuits
In fact, the so-called audio encoder and decoder. In fact, the algorithm is compressed or decompressed by the arithmetic chip after the ordinary AD or DA
Coding scheme:
The voice quality of waveform coding is high, but the coding rate is also high (WAV);
The coding rate of parameter coding is very low, and the quality of synthesized speech is not high (MP3);
Hybrid coding uses parameter coding technology and waveform coding technology, and the coding rate and sound quality are between them.
Introduction to program terms:
Waveform code PCM
Waveform coding is based on the digital processing of speech signal waveform, trying to make the reconstructed speech signal waveform consistent with the original speech signal waveform. The advantages of waveform coding are simple implementation, good voice quality, strong adaptability, etc.; the disadvantages are that the compression degree of voice signal is not very high, and the realized code rate is relatively high. Pulse code modulation (PCM) is a common method of waveform compression and coding
Parameter code MP3
MP3 file is actually a kind of data compressed by MP3 (dynamic image expert compression standard audio level) coding algorithm, which can not be directly sent to the power amplifier, but must be decoded to restore the original audio data before playing.
PWM principle
Code example
MCU bare board development
1 #include <reg52.h> 2 #include <intrins.h> 3 #define uchar unsigned char 4 #define uint unsigned int 5 //Recording and playback keys IO Definition of mouth: 6 sbit AN=P2^6;//Playback key control interface 7 sbit set_key=P2^7;//Recording key control port 8 // ISD4004 Definition of control port: 9 sbit SS =P1^0; //4004 Chip selection 10 sbit MOSI=P1^1; //4004 data input 11 sbit MISO=P1^2; //4004 data output 12 sbit SCLK=P1^3; //ISD4004 Clock 13 sbit INT =P1^4; //4004 interrupt 14 sbit STOP=P3^4; //4004 reset 15 sbit LED1 =P1^6; //Recording indicator 16 //===============================LCD1602 Interface definition===================== 17 /*----------------------------------------------------- 18 |DB0-----P2.0 | DB4-----P2.4 | RW-------P0.1 | 19 |DB1-----P2.1 | DB5-----P2.5 | RS-------P0.2 | 20 |DB2-----P2.2 | DB6-----P2.6 | E--------P0.0 | 21 |DB3-----P2.3 | DB7-----P2.7 | Note that P0.0 to P0.2 need to be connected with pull-up resistance 22 --------------------------------------------------- 23 =============================================================*/ 24 #define LCM_Data P0 //LCD1602 data interface 25 sbit LCM_RW = P2^3; //Read write control input, LCD1602 The fifth foot of 26 sbit LCM_RS = P2^4; //Register selection input, LCD1602 The fourth leg of 27 sbit LCM_E = P2^2; //Enable signal input,LCD1602 The sixth foot of 28 //***************Function declaration************************************************ 29 void WriteDataLCM(uchar WDLCM);//LCD Module write data 30 void WriteCommandLCM(uchar WCLCM,BuysC); //LCD Module write instruction 31 uchar ReadStatusLCM(void);//read LCD Busy label of module 32 void DisplayOneChar(uchar X,uchar Y,uchar ASCII);//In the first place X+1 Line No Y+1 Position display one character 33 void LCMInit(void); 34 void DelayUs(uint us); //Subtle delay procedure 35 void DelayMs(uint Ms);//Millisecond delay program 36 void init_t0();//Timer 0 initialization function 37 void setkey_treat(void);//Recording key handler 38 void upkey_treat(void);//Play key handler 39 void display();//Display handler 40 void isd_setrec(uchar adl,uchar adh);//Send out setrec instructions 41 void isd_rec();//Send out rec instructions 42 void isd_stop();//stop Command (stop current operation) 43 void isd_powerup();//Send power on command 44 void isd_stopwrdn();//Send power down command 45 void isd_send(uchar isdx);//spi Serial transmission subroutine, 8-bit data 46 void isd_setplay(uchar adl,uchar adh); 47 void isd_play(); 48 //Some constant definitions in the program 49 uint time_total,st_add,end_add=0; 50 uint adds[25];//25 Start address temporary storage of segment voice 51 uint adde[25];//25 The end address of segment voice is temporary 52 uchar t0_crycle,count,count_flag,flag2,flag3,flag4; 53 uchar second_count=170,msecond_count=0; 54 //second_count Is the starting address of the chip recording. The starting address was originally A0,That's 160, 55 //Let's start recording at 170. 56 #define Busy 0x80 //For testing LCM In the status word Busy Identification 57 58 /*=========================================================================== 59 main program 60 =============================================================================*/ 61 void main(void) 62 { 63 LED1=0;//Turn off recording indicator 64 flag3=0; 65 flag4=0; 66 time_total=340;//The recording address starts from 170, and the corresponding SCM starts timing 340*0.1 second 67 adds[0]=170; 68 count=0; 69 LCMInit(); //1602 initialization 70 init_t0();//timer initiated 71 DisplayOneChar( 0,5,'I'); //Display 000 when power on ISD4004-X 72 DisplayOneChar( 0,6,'S'); 73 DisplayOneChar( 0,7,'D'); 74 DisplayOneChar( 0,8,'4'); 75 DisplayOneChar( 0,9,'0'); 76 DisplayOneChar( 0,10,'0'); 77 DisplayOneChar( 0,11,'4'); 78 DisplayOneChar( 0,12,'-'); 79 DisplayOneChar( 0,13,'X'); 80 while(1) 81 { 82 display();//Display processing 83 upkey_treat();//Playback key processing 84 setkey_treat();//Recording key processing 85 } 86 } 87 //******************************************* 88 //Recording key handler 89 //This is the program that starts recording from the specified address 90 void setkey_treat(void) 91 { 92 set_key=1;//Set up IO Port 1, ready to read in data 93 DelayUs(1); 94 if(set_key==0) 95 { 96 if(flag3==0)//The recording key and the playback key are interlocked. After recording, it is forbidden to record again. If you want to record again, you need to reset the MCU and start recording again 97 { 98 if(count==0)//Determine whether it is the first time to press the recording key since power on or reset 99 { 100 st_add=170; 101 } 102 else 103 { 104 st_add=end_add+3; 105 }//3 addresses per language interval 106 adds[count]=st_add;//The starting address of each voice segment is temporary 107 if(count>=25)//When judging the number of voice segments, it is more than 25 segments, because of the relationship between SCM memory? 108 //This program only records 25 segments. If you want to record more voice, you can change it to non searchable 109 {//If more than 25 segments, overwrite the previous voice and start recording again 110 count=0; 111 st_add=170; 112 time_total=340; 113 } 114 isd_powerup(); //AN Key down, ISD Power on and delay 50 ms 115 isd_stopwrdn(); 116 isd_powerup(); 117 LED1=1;//The recording indicator is on, indicating the recording mode 118 isd_setrec(st_add&0x00ff,st_add>>8); //From the specified address 119 if(INT==1)// Determine whether the chip overflows 120 { 121 isd_rec(); //Send recording command 122 } 123 time_total=st_add*2;//Timing initial value calculation 124 TR0=1;//On timer 125 while(set_key==0);//Wait for the end of this recording 126 TR0=0;//Stop timing after recording 127 isd_stop(); //Send 4004 stop command 128 end_add=time_total/2+2;//Calculate the end address of voice 129 adde[count]=end_add;//Temporary storage of voice end address 130 LED1=0; //After recording, LED Extinguish 131 count++;//Recording segment number self adding 132 count_flag=count;//Recording segment number deposit 133 flag2=1; 134 flag4=1;//Unlock playback key 135 } 136 } 137 } 138 //================================================= 139 //Player handler 140 //It's the program to play this voice from the specified address 141 void upkey_treat(void) 142 { 143 uchar ovflog; 144 AN=1;//Prepare to read in data 145 DelayUs(1); 146 if(AN==0)//Judge whether the playback key acts 147 { 148 // if(flag4==1)//Interlock recording key 149 // { 150 if(flag2==1)//Judge whether it is the first playback after recording 151 { 152 count=0;//Play from segment 0 153 } 154 isd_powerup(); //AN Key down, ISD Power on and delay 50 ms 155 isd_stopwrdn(); 156 isd_powerup(); 157 //170 184 196 211 158 // st_add=adds[count];//Send the starting address of the current voice 159 st_add=211;//Send the starting address of the current voice 160 isd_setplay(st_add&0x00ff,st_add>>8); //Send out setplay Command, play from specified address 161 isd_play(); //Send playback command 162 DelayUs(20); 163 while(INT==1); //Waiting for the sound to finish EOM Interrupt signal 164 isd_stop(); //Play finished, send stop instructions 165 while(AN==0); // 166 isd_stop(); 167 count++;//Speech segment number self adding 168 flag2=0; 169 flag3=1; 170 if(count>=count_flag)//If you press the add key after playing to the last paragraph, play again from the first paragraph 171 { 172 count=0; 173 } 174 175 // } 176 } 177 } 178 //************************************************? 179 //Send out rec instructions 180 void isd_rec() 181 { 182 isd_send(0xb0); 183 SS=1; 184 } 185 //**************************************** 186 //Send out setrec instructions 187 void isd_setrec(unsigned char adl,unsigned char adh) 188 { 189 DelayMs(1); 190 isd_send(adl); //Send playback start address low 191 DelayUs(2); 192 isd_send(adh); //Start address high 193 DelayUs(2); 194 isd_send(0xa0); //Send out setplay Instruction byte 195 SS=1; 196 } 197 //============================================================================= 198 //********************************************** 199 //Timer 0 interrupt program 200 void timer0() interrupt 1 201 { 202 TH0=(65536-50000)/256; 203 TL0=(65536-50000)%256; 204 t0_crycle++; 205 if(t0_crycle==2)// 0.1 second 206 { 207 t0_crycle=0; 208 time_total++; 209 msecond_count++; 210 if(msecond_count==10)//1 second 211 { 212 msecond_count=0; 213 second_count++; 214 if(second_count==60) 215 { 216 second_count=0; 217 } 218 } 219 if(time_total==4800)time_total=0; 220 } 221 } 222 //******************************************************************************************** 223 //Timer 0 initialization function 224 void init_t0() 225 { 226 TMOD=0x01;//Set timer working mode 1, timer timing 50ms 227 TH0=(65536-50000)/256; 228 TL0=(65536-50000)%256; 229 EA=1;//Total interruption 230 ET0=1;//Allow timer 0 interrupt 231 t0_crycle=0;//Timer interrupt count unit 232 } 233 //****************************************** 234 //Display handler 235 void display() 236 { 237 uchar x; 238 if(flag3==1||flag4==1)//Judge whether there is any recording or playback 239 { 240 x=count-1; 241 if(x==255){x=count_flag-1;} 242 } 243 DisplayOneChar( 0,0,x/100+0x30); //What is the current voice 244 DisplayOneChar( 0,1,x/10%10+0x30); 245 DisplayOneChar( 0,2,x%10+0x30); 246 if(flag3==0)//Show the starting and ending address of this voice while recording 247 { 248 DisplayOneChar( 1,0,st_add/1000+0x30);//Calculate and display kilobits 249 DisplayOneChar( 1,1,st_add/100%10+0x30); 250 DisplayOneChar( 1,2,st_add/10%10+0x30); 251 DisplayOneChar( 1,3,st_add%10+0x30); 252 DisplayOneChar( 1,4,'-'); 253 DisplayOneChar( 1,5,'-'); 254 DisplayOneChar( 1,6,end_add/1000+0x30); 255 DisplayOneChar( 1,7,end_add/100%10+0x30); 256 DisplayOneChar( 1,8,end_add/10%10+0x30); 257 DisplayOneChar( 1,9,end_add%10+0x30); 258 } 259 if(flag4==1)//Show the starting and ending address of this voice during playback 260 { 261 DisplayOneChar( 1,0,adds[x]/1000+0x30); 262 DisplayOneChar( 1,1,adds[x]/100%10+0x30); 263 DisplayOneChar( 1,2,adds[x]/10%10+0x30); 264 DisplayOneChar( 1,3,adds[x]%10+0x30); 265 DisplayOneChar( 1,4,'-'); 266 DisplayOneChar( 1,5,'-'); 267 DisplayOneChar( 1,6,adde[x]/1000+0x30); 268 DisplayOneChar( 1,7,adde[x]/100%10+0x30); 269 DisplayOneChar( 1,8,adde[x]/10%10+0x30); 270 DisplayOneChar( 1,9,adde[x]%10+0x30); 271 } 272 } 273 //====================================================================== 274 // LCM initialization 275 //====================================================================== 276 void LCMInit(void) 277 { 278 LCM_Data = 0; 279 WriteCommandLCM(0x38,0); //Three time display mode setting, no busy signal detection 280 DelayMs(5); 281 WriteCommandLCM(0x38,0); 282 DelayMs(5); 283 WriteCommandLCM(0x38,0); 284 DelayMs(5); 285 WriteCommandLCM(0x38,1); //Display mode settings,Start to ask to detect busy signal every time 286 WriteCommandLCM(0x08,1); //Turn off display 287 WriteCommandLCM(0x01,1); //Clear screen 288 WriteCommandLCM(0x06,1); // Display cursor movement settings 289 WriteCommandLCM(0x0C,1); // Display on and cursor settings 290 DelayMs(100); 291 } 292 //*===================================================================== 293 // Write data function: E =High pulse RS=1 RW=0 294 //====================================================================== 295 void WriteDataLCM(uchar WDLCM) 296 { 297 ReadStatusLCM(); //Test busy 298 LCM_Data = WDLCM; 299 LCM_RS = 1; 300 LCM_RW = 0; 301 LCM_E = 0; //If the crystal speed is too high, a small delay can be added after this 302 LCM_E = 0; //delayed 303 LCM_E = 1; 304 } 305 //*==================================================================== 306 // Write instruction function: E=High pulse RS=0 RW=0 307 //====================================================================== 308 void WriteCommandLCM(unsigned char WCLCM,BuysC) //BuysC Ignore busy detection for 0 309 { 310 if (BuysC) ReadStatusLCM(); //Test busy as needed 311 LCM_Data = WCLCM; 312 LCM_RS = 0; 313 LCM_RW = 0; 314 LCM_E = 0; 315 LCM_E = 0; 316 LCM_E = 1; 317 } 318 //*==================================================================== 319 // Must be detected before normal read and write operation LCD Controller status:E=1 RS=0 RW=1; 320 // DB7: 0 LCD Controller idle, 1 LCD The controller is busy. 321 // Read status 322 //====================================================================== 323 unsigned char ReadStatusLCM(void) 324 { 325 LCM_Data = 0xFF; 326 LCM_RS = 0; 327 LCM_RW = 1; 328 LCM_E = 0; 329 LCM_E = 0; 330 LCM_E = 1; 331 while (LCM_Data & Busy); //Detect busy signal 332 return(LCM_Data); 333 } 334 //====================================================================== 335 //Function: Display one character at 1602:First line position 0~15,Line 2 16~31 336 //explain: The first X That's ok,The first y Column note:String cannot be longer than 16 characters 337 //====================================================================== 338 void DisplayOneChar( unsigned char X, unsigned char Y, unsigned char ASCII) 339 { 340 X &= 0x1; 341 Y &= 0xF; //limit Y Not more than 15, X Cannot be greater than 1 342 if (X) Y |= 0x40; //Address code when the second line is to be displayed+0x40; 343 Y |= 0x80; // Work out the instruction code 344 WriteCommandLCM(Y, 0); //No busy signal is detected here, send address code 345 WriteDataLCM(ASCII); 346 } 347 //====================================================================== 348 //spi Serial transmission subroutine, 8-bit data 349 void isd_send(uchar isdx) 350 { 351 uchar isx_counter; 352 SS=0;//ss=0,open spi Communication terminal 353 SCLK=0; 354 for(isx_counter=0;isx_counter<8;isx_counter++)//Send low first, then high, and send in turn. 355 { 356 if((isdx&0x01)==1) 357 MOSI=1; 358 else 359 MOSI=0; 360 isdx=isdx>>1; 361 SCLK=1; 362 DelayUs(2); 363 SCLK=0; 364 DelayUs(2); 365 } 366 } 367 //====================================================================== 368 //stop Command (stop current operation) 369 void isd_stop()// 370 { 371 DelayUs(10); 372 isd_send(0x30); 373 SS=1; 374 DelayMs(50); 375 } 376 //====================================================================== 377 //Send power on command 378 void isd_powerup()// 379 { 380 DelayUs(10); 381 SS=0; 382 isd_send(0x20); 383 SS=1; 384 DelayMs(50); 385 } 386 //====================================================================== 387 //Send power down command 388 void isd_stopwrdn()// 389 { 390 DelayUs(10); 391 isd_send(0x10); 392 SS=1; 393 DelayMs(50); 394 } 395 396 void isd_play()//Send out play instructions 397 { 398 isd_send(0xf0); 399 SS=1; 400 } 401 void isd_setplay(uchar adl,uchar adh)//Send out setplay instructions 402 { 403 DelayMs(1); 404 isd_send(adl); //Send playback start address low 405 DelayUs(2); 406 isd_send(adh); //Start address high 407 DelayUs(2); 408 isd_send(0xe0); //Send out setplay Instruction byte 409 SS=1; 410 } 411 void DelayUs(uint us) 412 { 413 while(us--); 414 } 415 //==================================================================== 416 // Set delay time:x*1ms 417 //==================================================================== 418 void DelayMs(uint Ms) 419 { 420 uint i,TempCyc; 421 for(i=0;i<Ms;i++) 422 { 423 TempCyc = 250; 424 while(TempCyc--); 425 } 426 } 427