In the process of UAV flight, the higher the flight, the farther the field of vision, and only part of the required area, the additional area will become interference, so it is necessary to extract the target area.

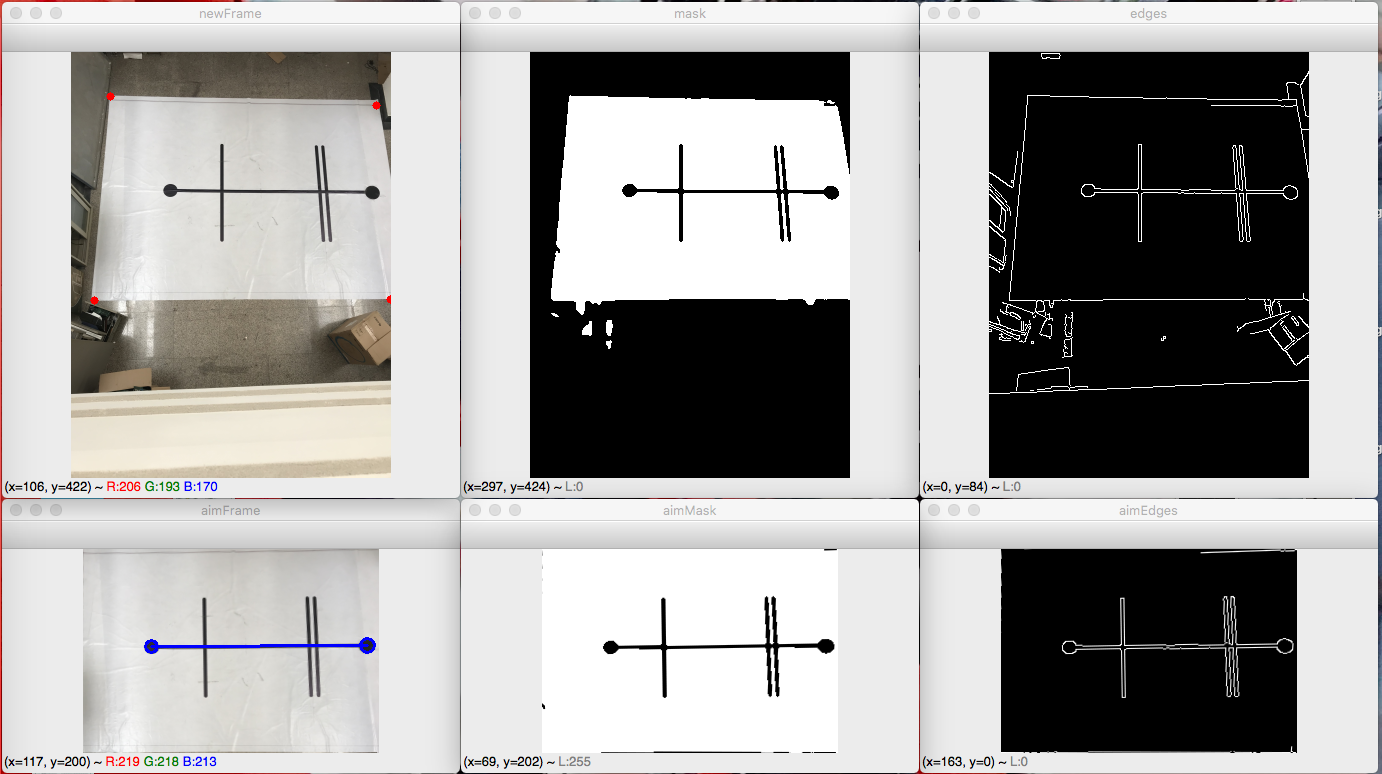
This is our high-altitude overhead view, from which we can see that the obvious feature of our target area is: a large area of white background. The method is obvious. First, the white area is deleted and the contour points are extracted. Finally, the target area is extracted from the original image according to the contour points.
Code:
import cv2
import numpy as np
import imutils
from imutils.perspective import four_point_transform
frame = cv2.imread("cut3.JPG")
frame = imutils.resize(frame, width=320) #size pictures
edges = cv2.Canny(frame,100,300) #Edge detection, just for display
#Extraction of white areas
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
mask = cv2.inRange(hsv, np.array((0., 0., 160)), np.array((180., 15.,255.)))
mask = cv2.medianBlur(mask,3) #Salt and pepper noise
#Extracting Contour Points of White Region
cnts = cv2.findContours(mask.copy(), cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)
cnts = cnts[0] if imutils.is_cv2() else cnts[1]
aimcnt = None
if len(cnts) > 0:
#Sort from large to small according to area size
cnts = sorted(cnts, key=cv2.contourArea, reverse=True)
#Find four corners of the target contour
for i in cnts:
arc = cv2.arcLength(i, True) #In calculating the circumference, the following functions generally take the circumference as a parameter
approx = cv2.approxPolyDP(i, 0.1 * arc, True) #Extracting Approximate Contour Points
if len(approx) == 4:
aimcnt = approx
break
#rect = cv2.minAreaRect(cnts[0])
#box = np.int0(cv2.boxPoints(rect)) #Four contour points can also be obtained here, but the effect in this picture is not as good as the above method.
#Drawing Four Object Contour Points
newFrame=frame.copy()
for i in aimcnt:
cv2.circle(newFrame, (i[0][0],i[0][1]),4, (0, 0, 255), -1)
#Extraction of target region
aimFrame = four_point_transform(frame, aimcnt.reshape(4, 2))
aimMask = four_point_transform(mask, aimcnt.reshape(4, 2))
aimEdges = four_point_transform(edges, aimcnt.reshape(4, 2))
aimGray = cv2.cvtColor(aimFrame,cv2.COLOR_BGR2GRAY) #Transform to grayscale and perform Hough circle detection.
#Detection circle
circles = cv2.HoughCircles(aimGray,cv2.HOUGH_GRADIENT,1,100,param1=100,param2=20,minRadius=1,maxRadius=20)
#Draw circles
if circles is not None:
for i in circles[0,:]:
cv2.circle(aimFrame,(i[0],i[1]),i[2],(255,0,0),2)
Circles_x = int(i[0])
Circles_y = int(i[1])
cv2.line(aimFrame, (circles[0][0][0], circles[0][0][1]), (circles[0][1][0], circles[0][1][1]), (255, 0, 0), 2)
else:
Circles_x = 160 #Image Points When Opening Camera
Circles_y = 120
cv2.imshow('newFrame',newFrame)
cv2.imshow('mask',mask)
cv2.imshow('edges',edges)
cv2.imshow('aimFrame',aimFrame)
cv2.imshow('aimMask',aimMask)
cv2.imshow('aimEdges',aimEdges)
cv2.waitKey(0)Results:
Source download: