The bullet rebound diagram is as follows: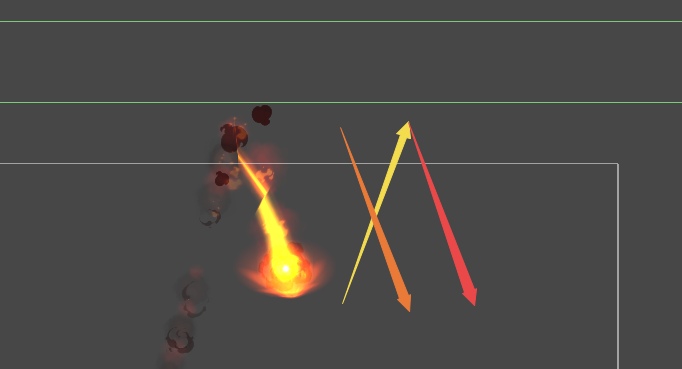
1. Both walls and bullets are collisions.
2. Prerequisites: We need to know the bullet's forward direction vector and the wall's direction vector.
3. Calculate the simple process. Yellow is the bullet direction vector. Calculate the angle between the bullet and the wall. Calculate the orange direction vector according to the incident angle equal to the reflection angle. At this time, only the bullet direction has changed, and then the offset of position is calculated. According to the angle between the wall and the bullet itself, the offset is calculated by the trigonometric function sin/cos. The final effect is like the red arrow.
Code:
-- The bullet bounced back. ColliderObj: Collision wall has four sides. AmmoLength: Estimated bullet length,Remarks: self.Dir For the current direction vector of the bullet,self.o_Transform An example of a bullet,
function AmmoBase:ReflectBullet(ColliderObj, AmmoLength)
local inNormal = nil
local wallNormal = nil
local XOrZ = true
if tostring(ColliderObj.transform.name) == "ForwardWall" then
inNormal = Vector3(0, 0, -1)
wallNormal = Vector3(1, 0, 0)
XOrZ = true
elseif tostring(ColliderObj.transform.name) == "BackWall" then
inNormal = Vector3(0, 0, 1)
wallNormal = Vector3(1, 0, 0)
XOrZ = true
elseif tostring(ColliderObj.transform.name) == "LeftWall" then
inNormal = Vector3(1, 0, 0)
wallNormal = Vector3(0, 0, 1)
XOrZ = false
elseif tostring(ColliderObj.transform.name) == "RightWall" then
inNormal = Vector3(-1, 0, 0)
wallNormal = Vector3(0, 0, 1)
XOrZ = false
end
if inNormal == nil then
return
end
local wallAngle = Vector3.Angle(self.Dir, wallNormal)
local reflexDir = Vector3.Reflect(self.Dir,inNormal)
local dirAngle = 180 - Vector3.Angle(self.Dir, reflexDir)
local dic = math.sin(math.rad(dirAngle)) * AmmoLength
-- log(tostring(wallAngle) .. " Angle with wall")
-- log(tostring(reflexDir) .. " Correction vector")
-- log(tostring(dirAngle) .. " Reflection angle")
-- log(tostring(dic) .. " Position correction")
local pos = self.o_Transform.position
if XOrZ then
if wallAngle > 90 then
self.o_Transform.position = Vector3(pos.x - dic, pos.y, pos.z)
else
self.o_Transform.position = Vector3(pos.x + dic, pos.y, pos.z)
end
else
if wallAngle > 90 then
self.o_Transform.position = Vector3(pos.x, pos.y, pos.z - dic)
else
self.o_Transform.position = Vector3(pos.x, pos.y, pos.z + dic)
end
end
self.Dir = reflexDir
self.o_Transform.rotation = Quaternion.FromToRotation(Vector3.forward, self.Dir) -- Direction correction
end