catalogue
1, External interrupt to realize the flashing and extinguishing of LED
2. Compiling and writing programs
2, Serial port interrupt to realize serial port communication
3, Serial port DMA receiving and sending data
1, External interrupt to realize the flashing and extinguishing of LED
1. Create project

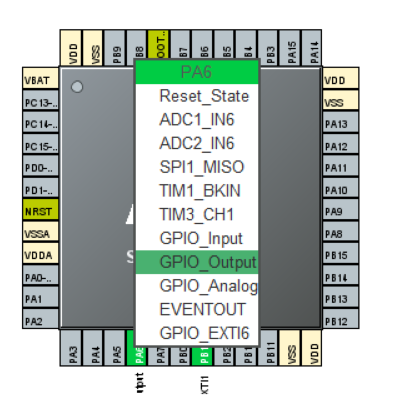
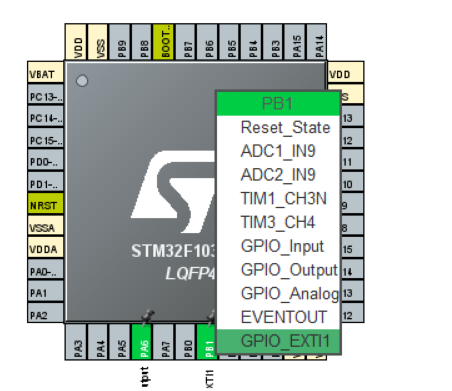
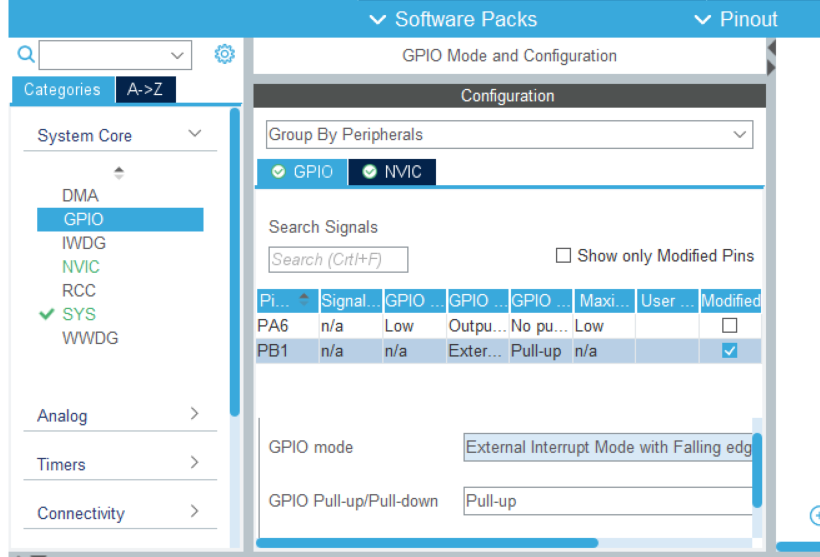
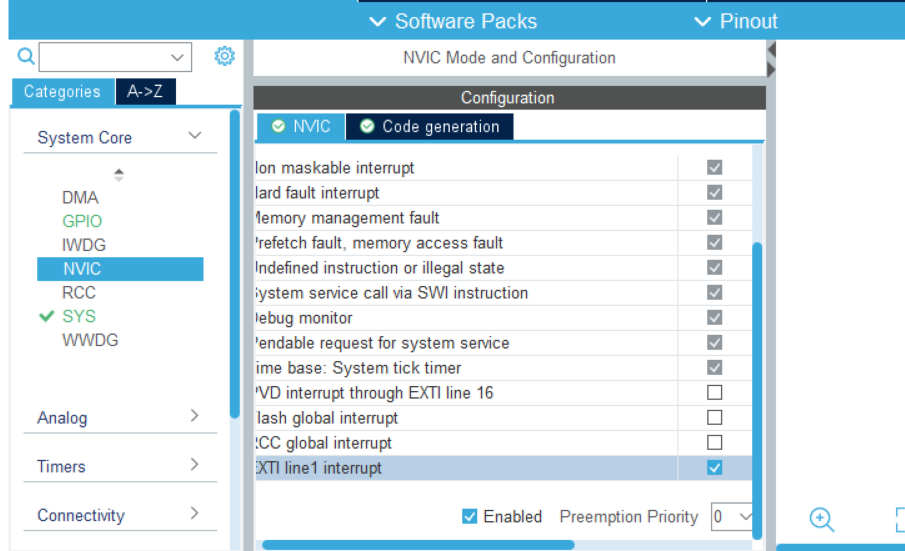
Then automatically generate the program.
2. Compiling and writing programs
To see the generated interrupt service function void EXTI1_IRQHandler(void)
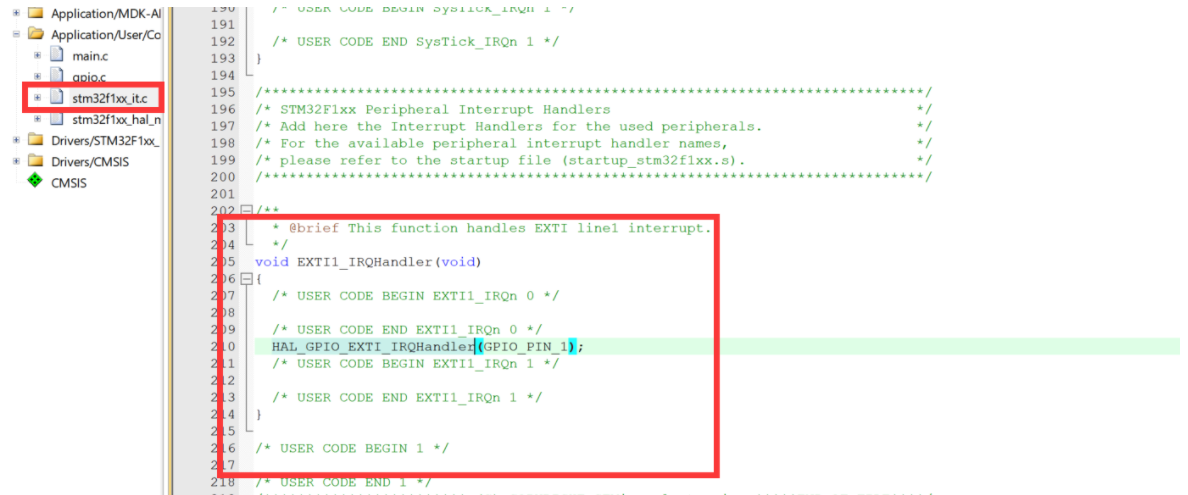
You can see that the function calls Hal again_ GPIO_ EXTI_ Irqhandler(), then continues to jump to the next function
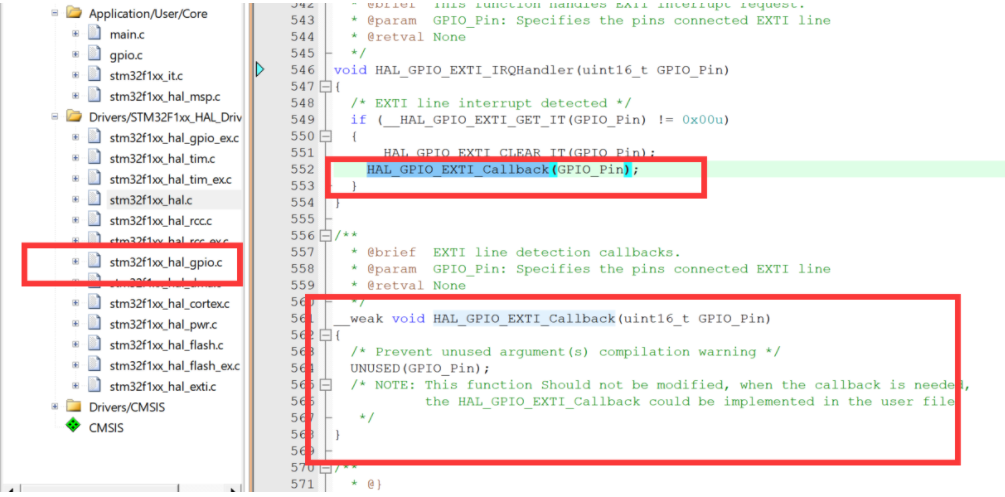
You can see that HAL_ is called in here. GPIO_ EXTI_ Callback(), the next function can be seen as_ Start with weak, you need to write the function yourself.
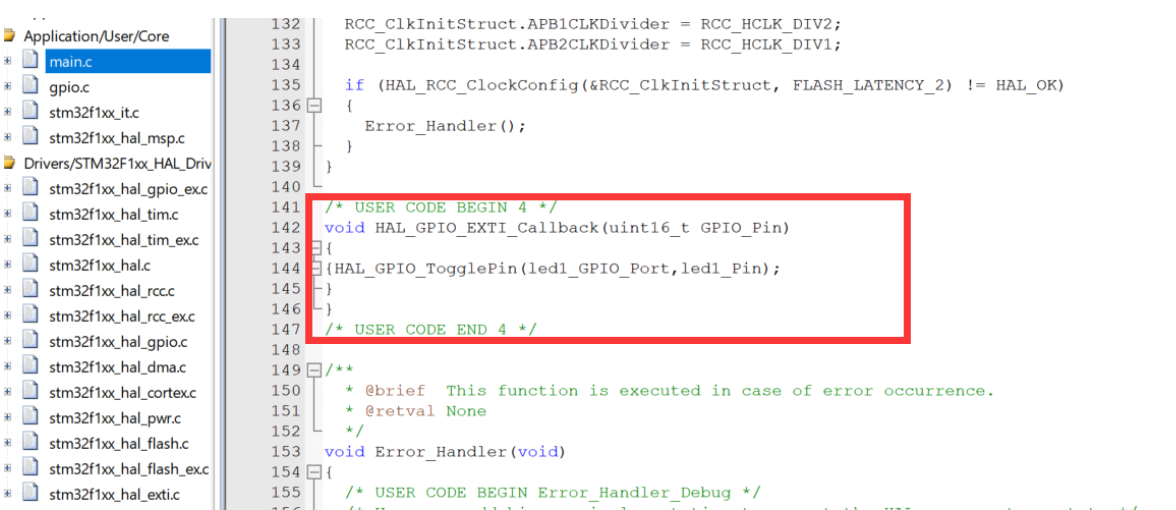
At this time, write the callback program in main.c, and the library function used is HAL_GPIO_TogglePin(), this function is used to flip the level, that is, once an interrupt is generated, it will flip the level once.
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
{HAL_GPIO_TogglePin(led1_GPIO_Port,led1_Pin);
}
}

Then compile.
3. Burning

Set boot0 to 0 when powered on, and then reset again to run
4. Experimental results
Here, because stm32c8t6 there is no key, DuPont line is selected to replace the switch. Each contact with ground will produce an interrupt
2, Serial port interrupt to realize serial port communication
1. Create project
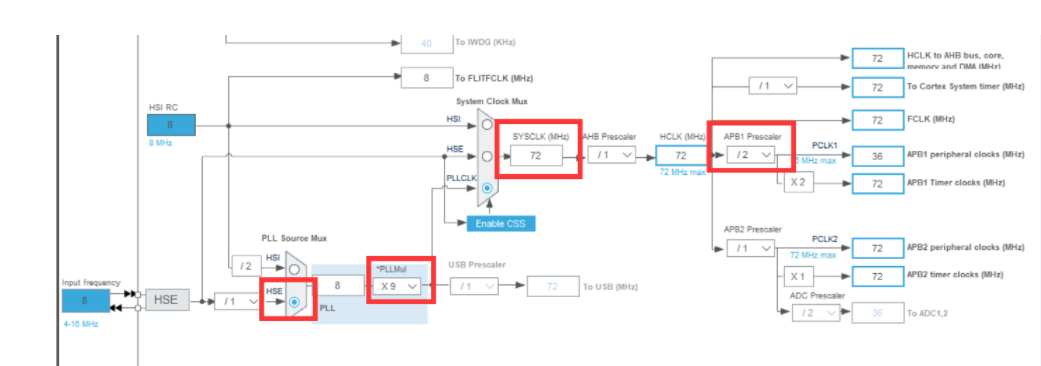
RCC, SYS and CLOCK settings are the same as above
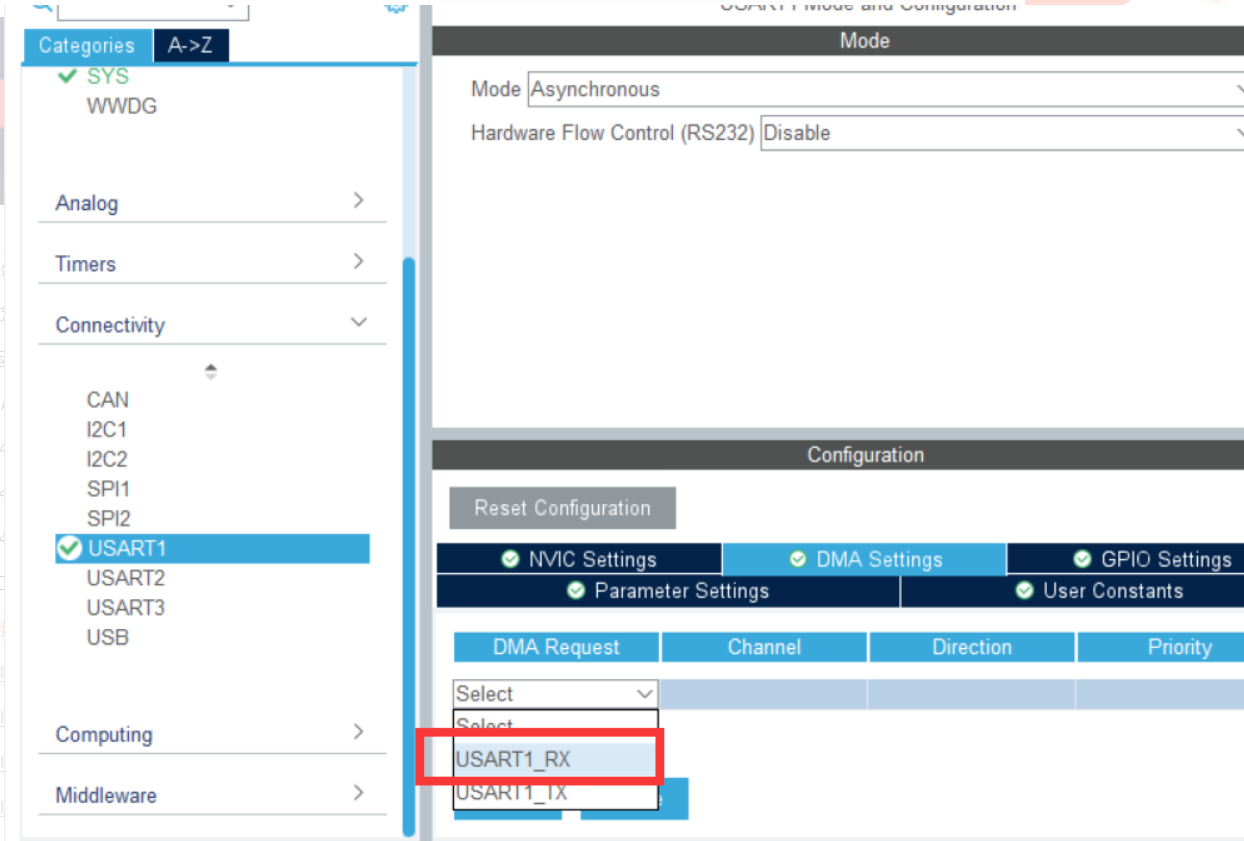
Next, set the serial port USART1, select Asynchronous (Asynchronous communication MODE) in MODE, and enable the USART1 interrupt
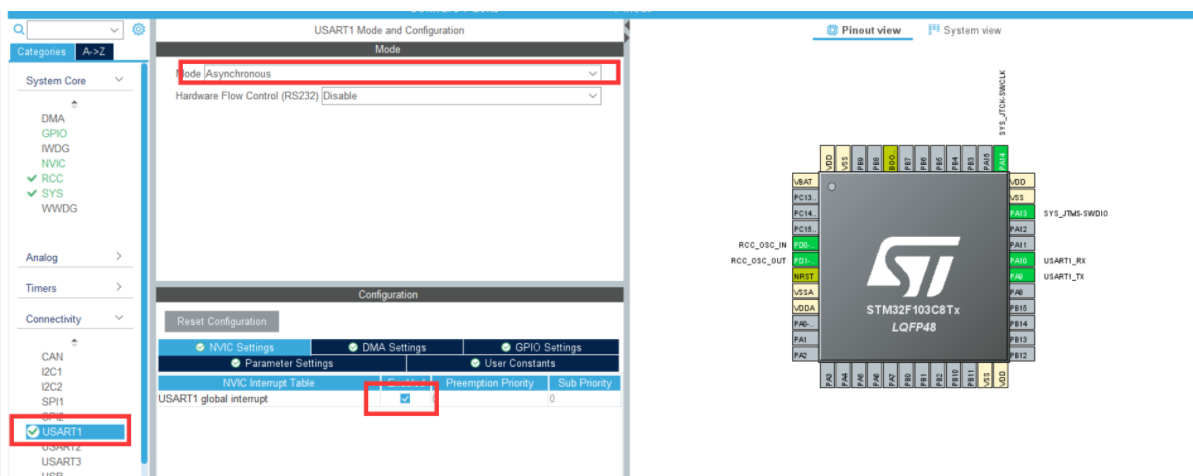
Then you can directly generate the project
2. Redirect printf and scanf
#include <stdio.h> extern UART_HandleTypeDef huart1; //Declaration serial port
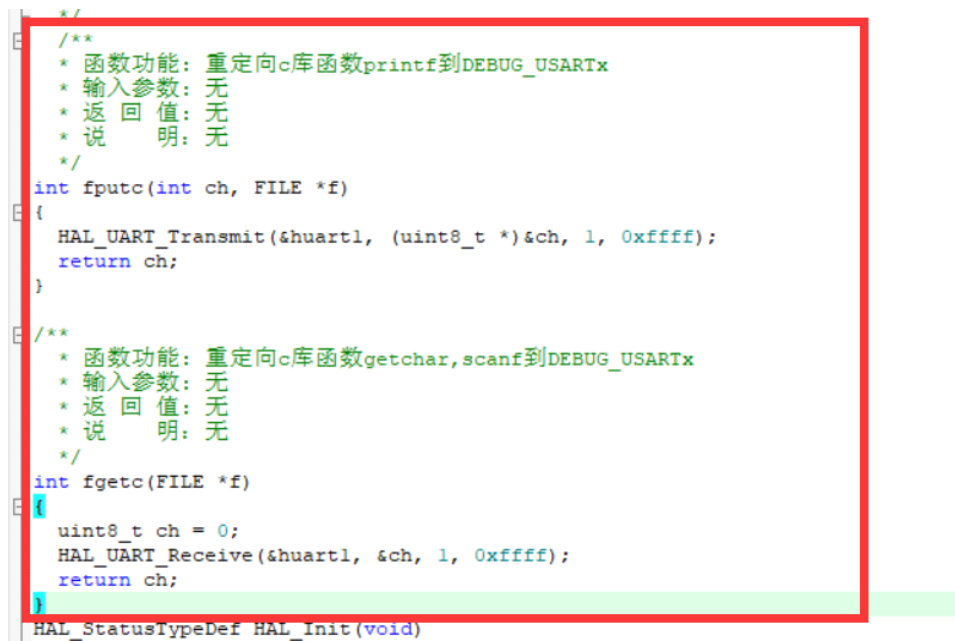
- In stm32f1xx_hal.c Rewrite fget and fput functions in
/**
* Function function: redirect c library function printf to DEBUG_USARTx
* Input parameters: None
* Return value: None
* Description: None
*/
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xffff);
return ch;
}
/**
* Function function: redirect c library functions getchar and scanf to DEBUG_USARTx
* Input parameters: None
* Return value: None
* Description: None
*/
int fgetc(FILE *f)
{
uint8_t ch = 0;
HAL_UART_Receive(&huart1, &ch, 1, 0xffff);
return ch;
}
Add in main.c
#define RXBUFFERSIZE 256 char RxBuffer[RXBUFFERSIZE];
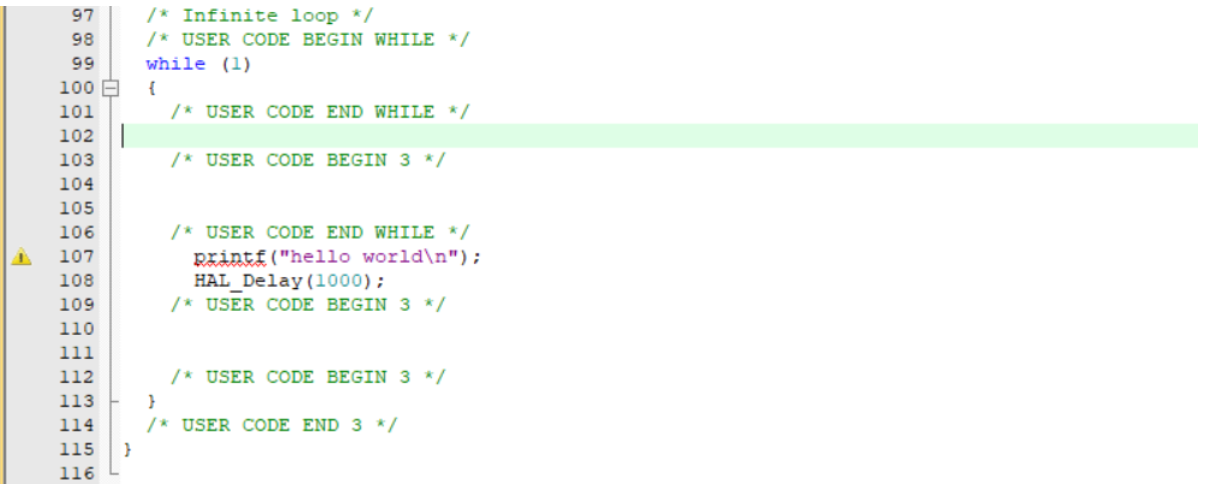
printf("hello world\n");
HAL_Delay(1000);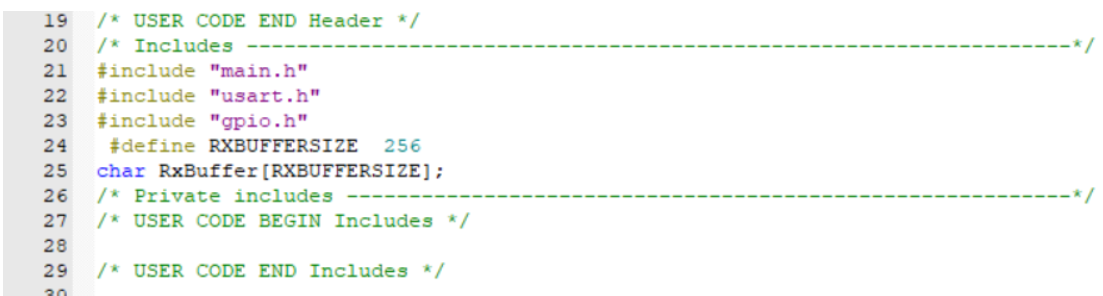
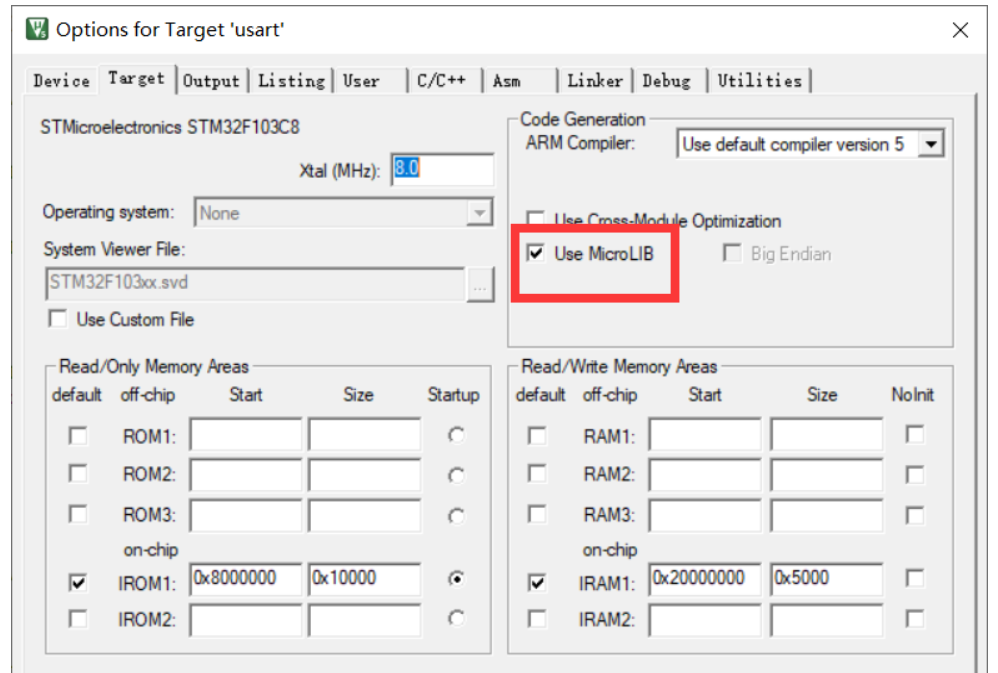
Check Use MicroLIB in target to call the microlibrary
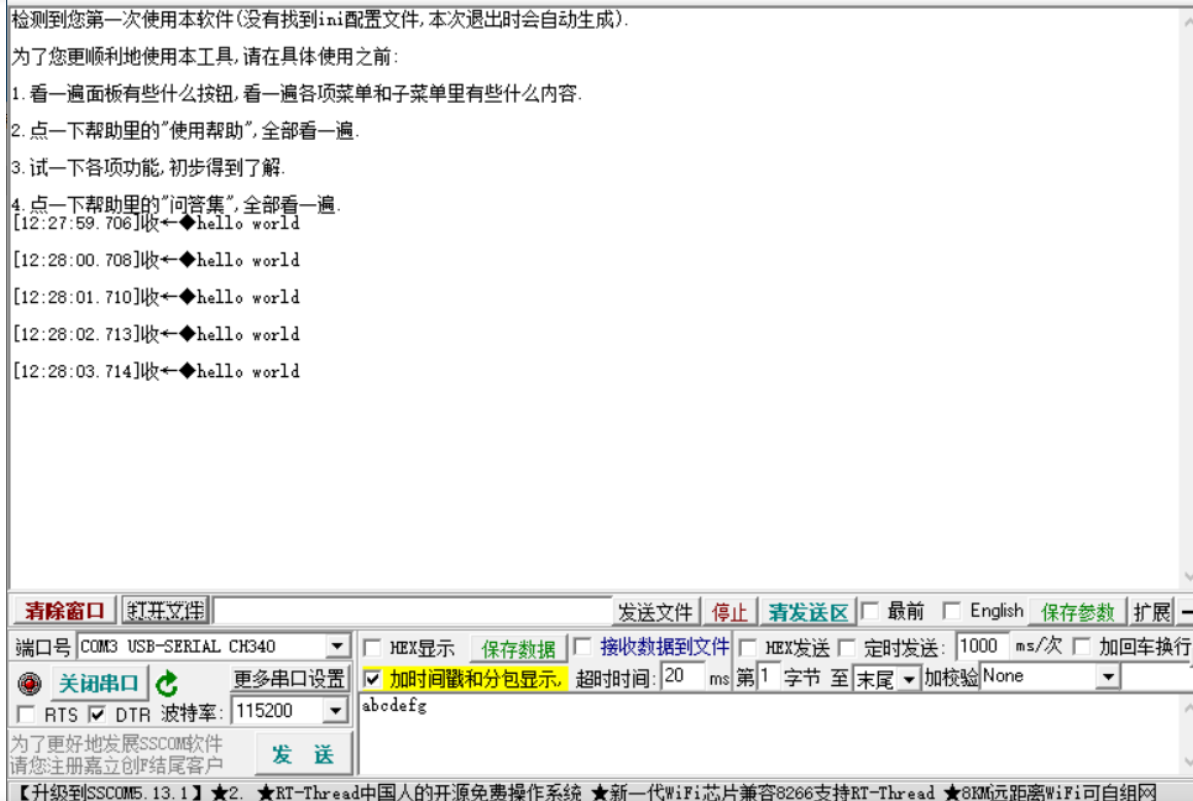
3. Operation results
4.UART receiving interrupt
Specific process:
- Initialize serial port
- Call the receive interrupt function for the first time in main
- Enter receive interrupt and finish receiving data Enter interrupt callback function
- Modify HAL_UART_RxCpltCallback interrupt callback function to process the received data,
- Hal will be called once in the callback function_ UART_ Receive_ It function, so that the program can re trigger the receiving
code implementation
And add the following definitions in main.c:
#include <string.h> #Define rxbuffersize 256 / / maximum number of bytes received char RxBuffer[RXBUFFERSIZE]; //receive data
In the main() main function, the call interrupt function is called once.
/* USER CODE BEGIN 2 */ HAL_UART_Receive_IT(&huart1, RxBuffer, 1); /* USER CODE END 2 */
Add interrupt callback function under main.c
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance==USART1)
{
HAL_UART_Transmit(&huart1,RxBuffer,1,0xff);
}
HAL_UART_Receive_IT(&huart1, RxBuffer, 1);
}
Experimental results
You can see the serial port echo.
3, Serial port DMA receiving and sending data
1. Create project
Refer to the above serial port settings for other settings
Here are the differences
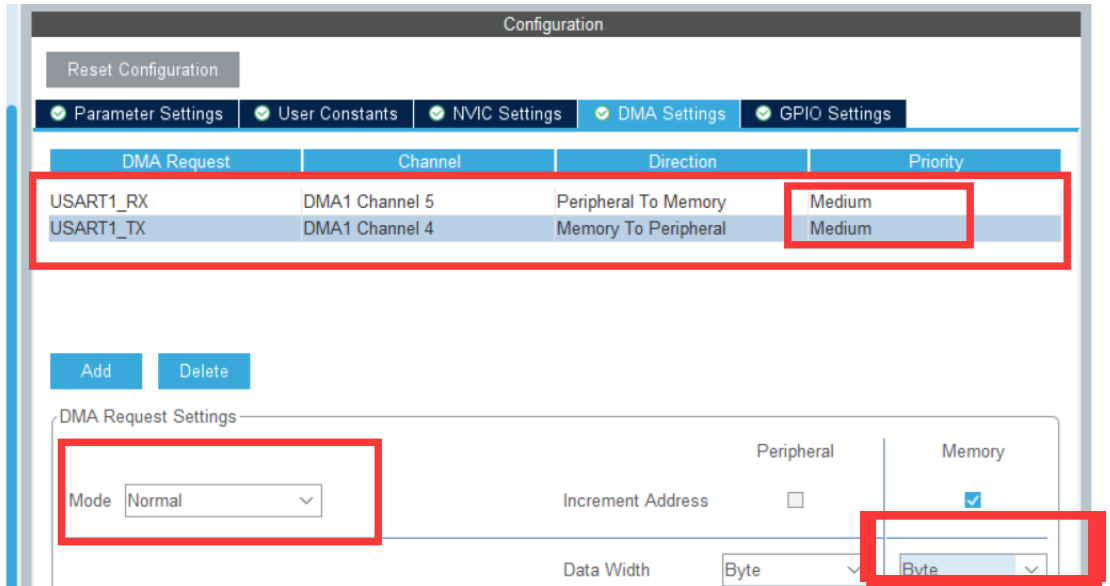
Enter DMA Settings
Click add and select USART_RX USART_TX The transmission rate is set to medium speed
DMA transmission mode is normal mode
DMA memory address increases by one byte at a time
Click System Core DMA on the right
Click Add to add menomen
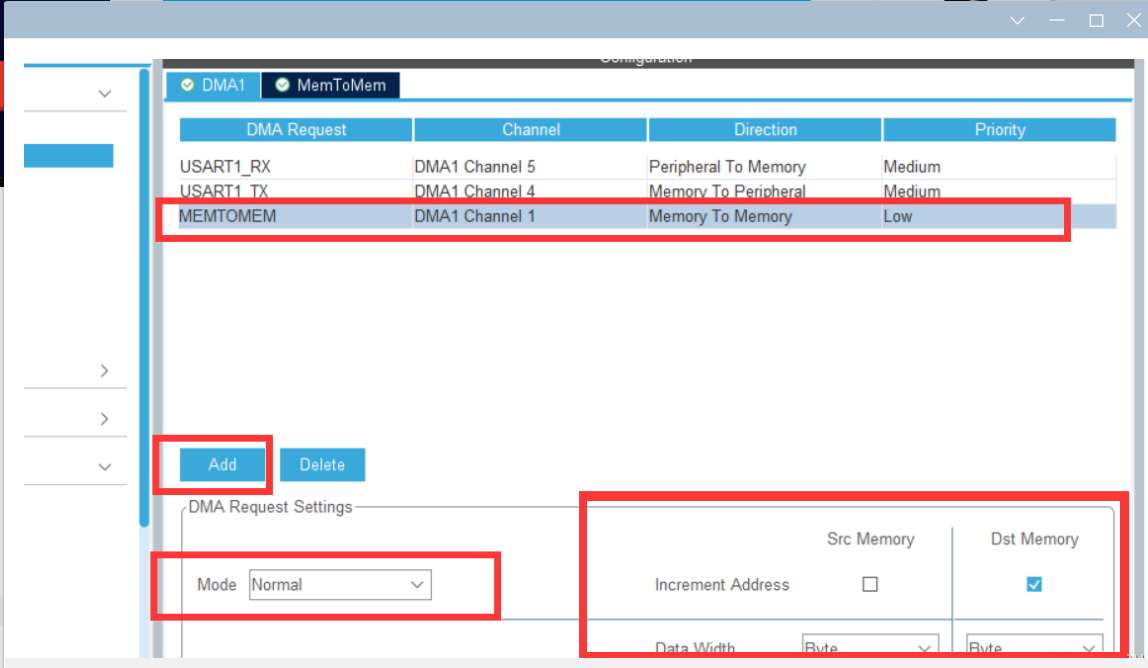
Normal: normal mode
After one DMA data transmission, stop DMA transmission, that is, only one transmission
DMA pointer increment setting
Increment Address: the address pointer is incremented (described above).
Src Memory on the left represents the peripheral address register
Function: set whether the peripheral address remains unchanged or increases when transmitting data. If it is set to increment, add Data Width bytes to the address in the next transmission,
Dst Memory on the right represents the memory address register
Function: set whether the memory address is incremented when transmitting data. If it is set to increment, add Data Width bytes to the address in the next transmission,
This is the same as Src Memory, except for memory.
The project can then be generated.
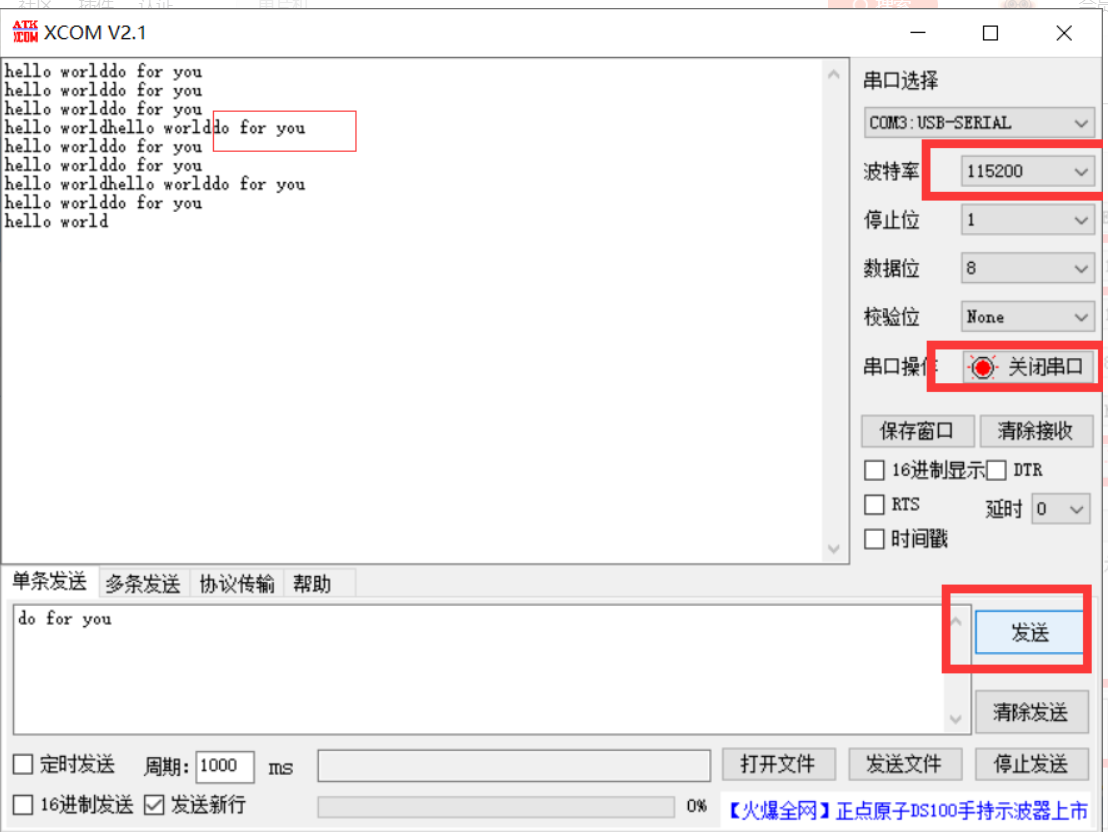
2. Test routine 1
Add in main.C:
/* USER CODE BEGIN Init */ uint8_t Senbuff[] = "HELLO WORLD"; //Define data sending array /* USER CODE END Init */
while loop:
while (1)
{
/* USER CODE END WHILE */
HAL_UART_Transmit_DMA(&huart1, Senbuff, sizeof(Senbuff));
HAL_Delay(1000);
/* USER CODE BEGIN 3 */
}
3. Test results
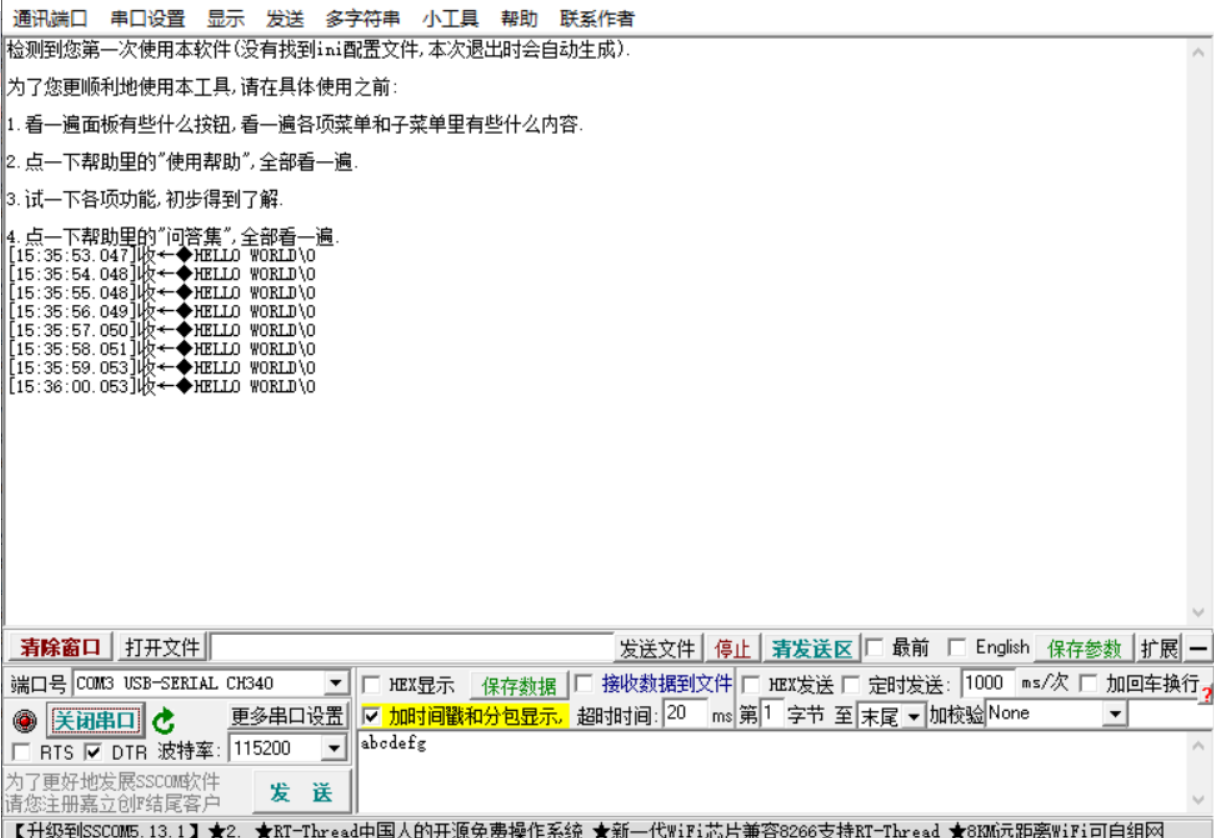
4. Test routine 2
STM32 IDLE receive idle interrupt
Generation condition of IDLE interrupt of STM32: it will not be generated when there is no data reception on the serial port. After clearing the IDLE flag bit, it must be triggered after the first data is received. Once the received data is cut off and no data is received, the IDLE interrupt is generated
code:
uart.c
volatile uint8_t rx_len = 0; //The length of a frame of data received
volatile uint8_t recv_end_flag = 0; //One frame data receiving completion flag
uint8_t rx_buffer[100]={0}; //Receive data cache array
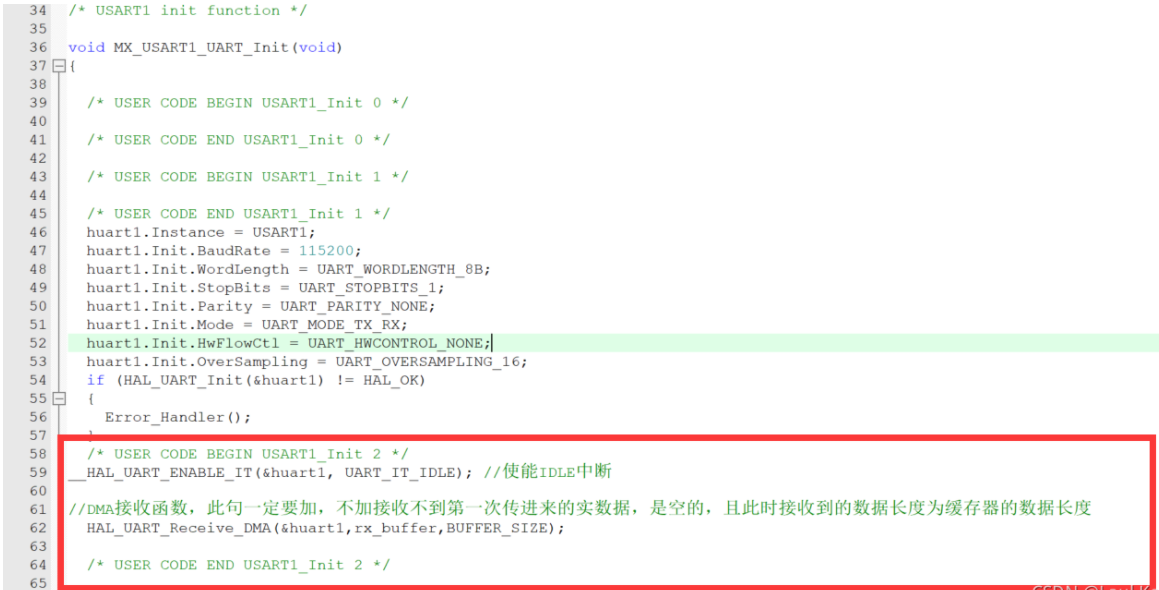
/* USER CODE BEGIN USART1_Init 2 */ __HAL_UART_ENABLE_IT(&huart1, UART_IT_IDLE); //Enable IDLE interrupt //DMA receiving function, this sentence must be added. If not, the real data transmitted for the first time cannot be received. It is empty, and the data length received at this time is the data length of the buffer HAL_UART_Receive_DMA(&huart1,rx_buffer,BUFFER_SIZE); /* USER CODE END USART1_Init 2 */
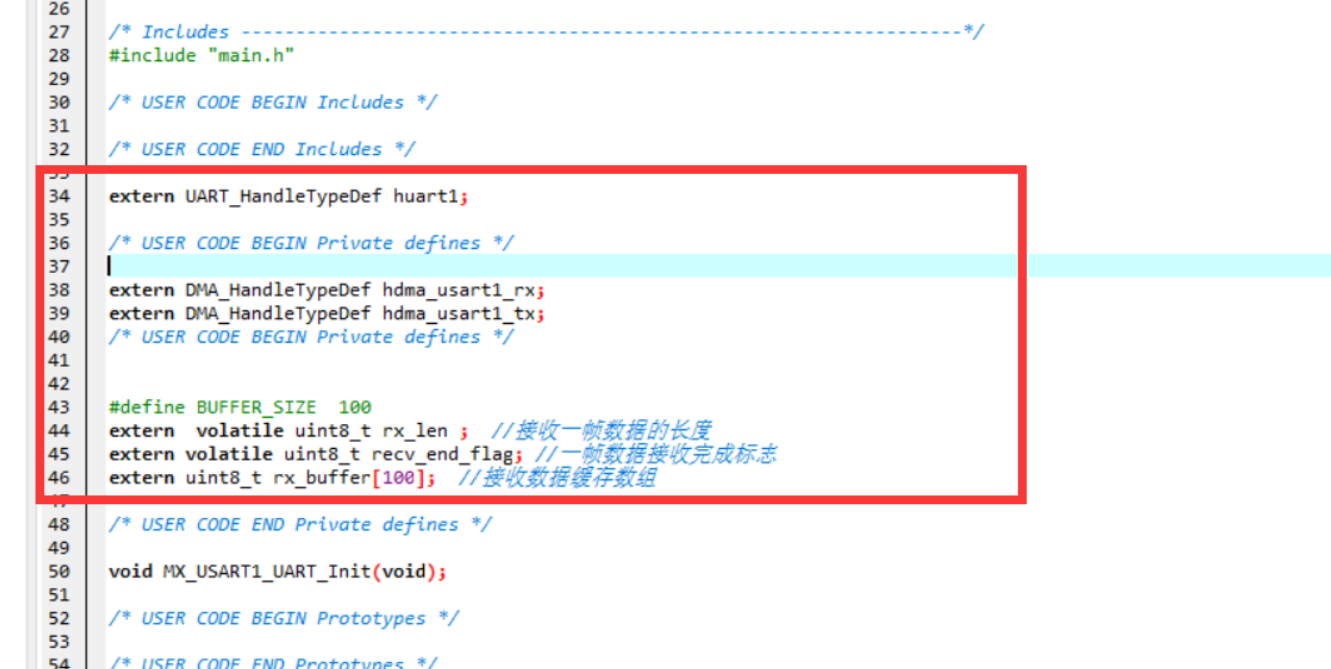
uart.h
extern UART_HandleTypeDef huart1; extern DMA_HandleTypeDef hdma_usart1_rx; extern DMA_HandleTypeDef hdma_usart1_tx; /* USER CODE BEGIN Private defines */ #define BUFFER_SIZE 100 extern volatile uint8_t rx_len ; //The length of a frame of data received extern volatile uint8_t recv_end_flag; //One frame data receiving completion flag extern uint8_t rx_buffer[100]; //Receive data cache array
There is no. h file in the project. You need to find it in the folder
main.c
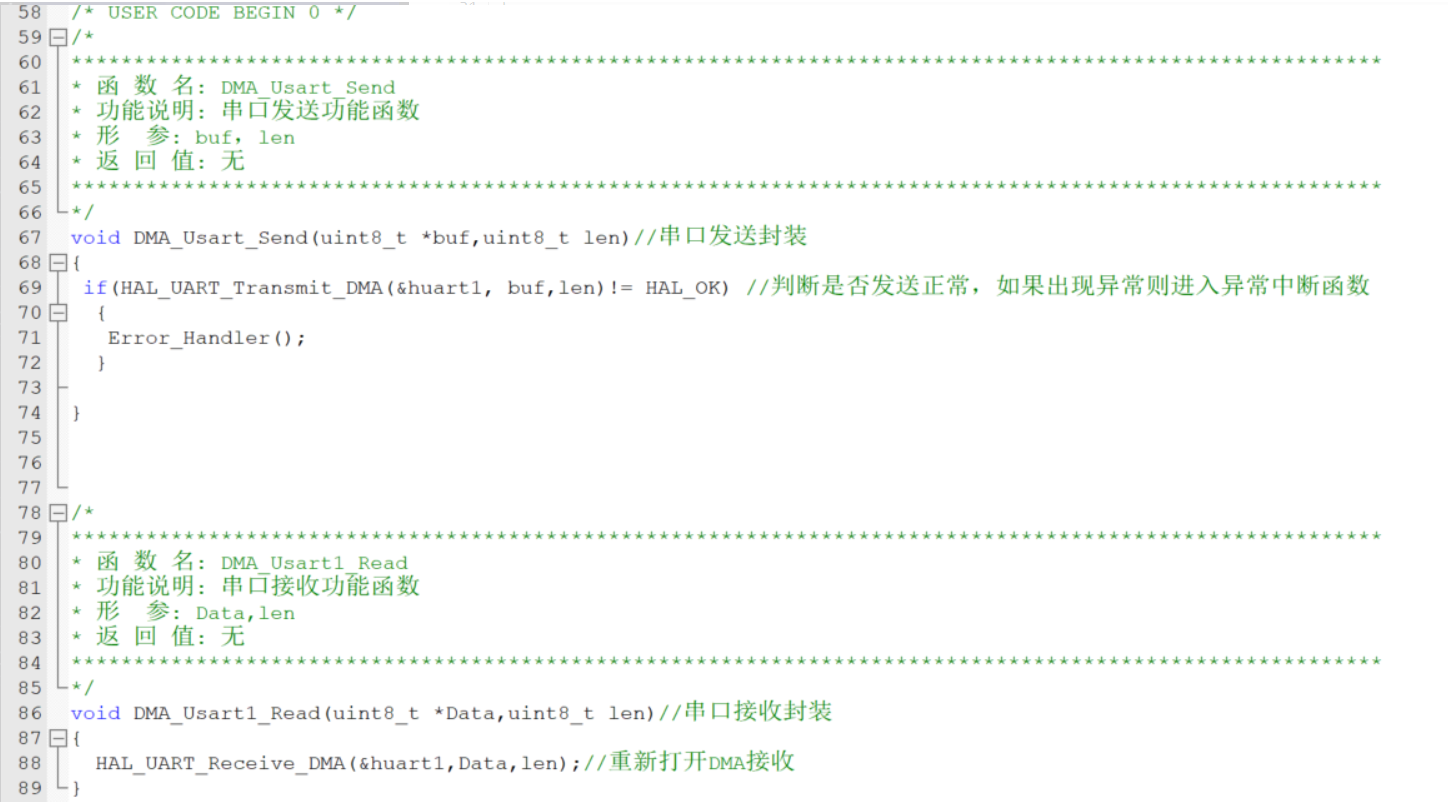
/*
*********************************************************************************************************
* Function name: DMA_Usart_Send
* Function Description: serial port sending function
* Formal parameters: buf, len
* Return value: None
*********************************************************************************************************
*/
void DMA_Usart_Send(uint8_t *buf,uint8_t len)//Serial transmission package
{
if(HAL_UART_Transmit_DMA(&huart1, buf,len)!= HAL_OK) //Judge whether the transmission is normal. If there is an exception, enter the exception interrupt function
{
Error_Handler();
}
}
/*
*********************************************************************************************************
* Function name: DMA_Usart1_Read
* Function Description: serial port receiving function
* Formal parameters: Data,len
* Return value: None
*********************************************************************************************************
*/
void DMA_Usart1_Read(uint8_t *Data,uint8_t len)//Serial port receiving package
{
HAL_UART_Receive_DMA(&huart1,Data,len);//Reopen DMA reception
}Here, it needs to be defined in front of the main function, otherwise an error will be reported when calling in the main function, or you can declare the function before main.
while Loop
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(recv_end_flag == 1) //Reception completion flag
{
DMA_Usart_Send(rx_buffer, rx_len);
rx_len = 0;//Clear count
recv_end_flag = 0;//Clear the end of reception flag bit
// for(uint8_t i=0;i<rx_len;i++)
// {
// rx_buffer[i]=0;// Clear receive cache
// }
memset(rx_buffer,0,rx_len);
}
HAL_UART_Receive_DMA(&huart1,rx_buffer,BUFFER_SIZE);//Reopen DMA reception
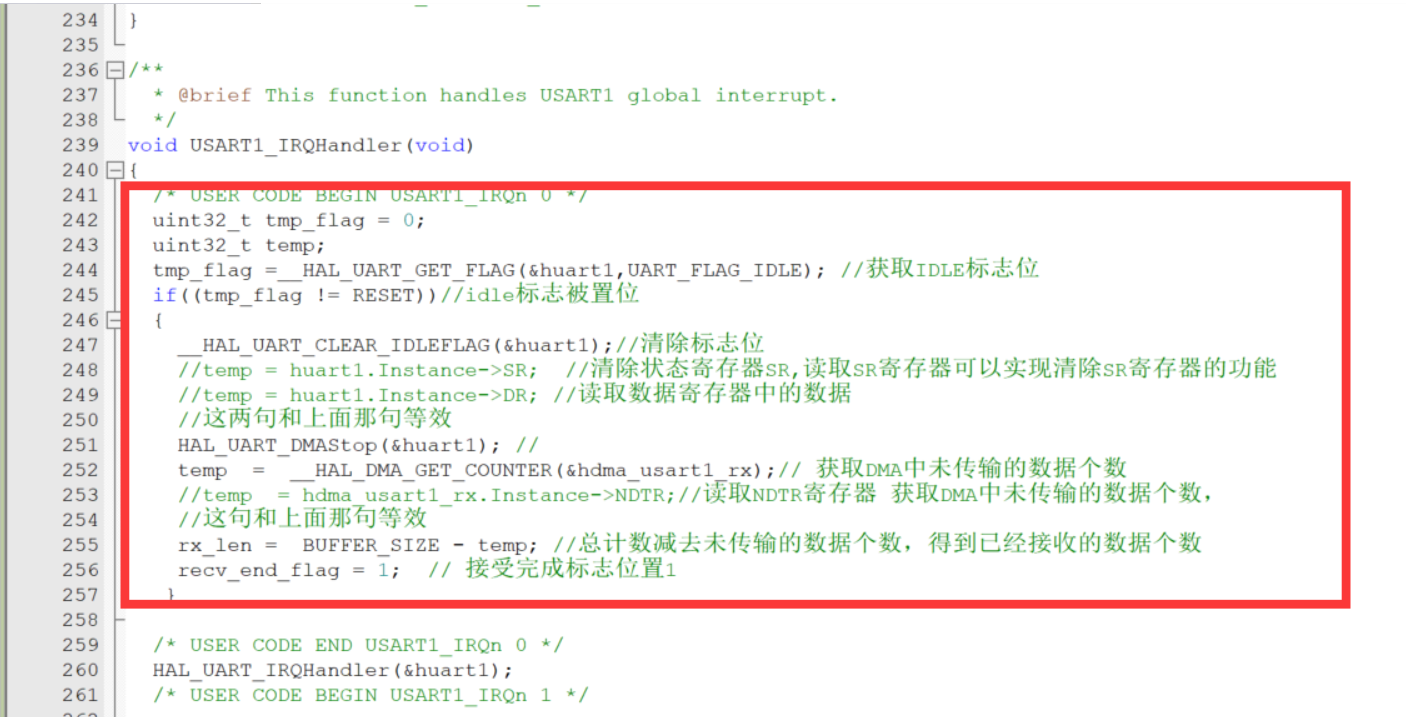
}stm32f1xx_ In it. C
#include "usart.h"
void USART1_IRQHandler(void)
{
uint32_t tmp_flag = 0;
uint32_t temp;
tmp_flag =__HAL_UART_GET_FLAG(&huart1,UART_FLAG_IDLE); //Get the IDLE flag bit
if((tmp_flag != RESET))//The idle flag is set
{
__HAL_UART_CLEAR_IDLEFLAG(&huart1);//Clear flag bit
//temp = huart1.Instance->SR; // Clear the status register Sr and read the SR register to clear the SR register
//temp = huart1.Instance->DR; // Read data in data register
//These two sentences are equivalent to the one above
HAL_UART_DMAStop(&huart1); //
temp = __HAL_DMA_GET_COUNTER(&hdma_usart1_rx);// Gets the number of untransmitted data in DMA
//temp = hdma_ usart1_ rx.Instance->NDTR;// Read the NDTR register to obtain the number of untransmitted data in DMA,
//This sentence is equivalent to the one above
rx_len = BUFFER_SIZE - temp; //The total count subtracts the number of untransmitted data to obtain the number of received data
recv_end_flag = 1; // Accept completion flag position 1
}
HAL_UART_IRQHandler(&huart1);
}
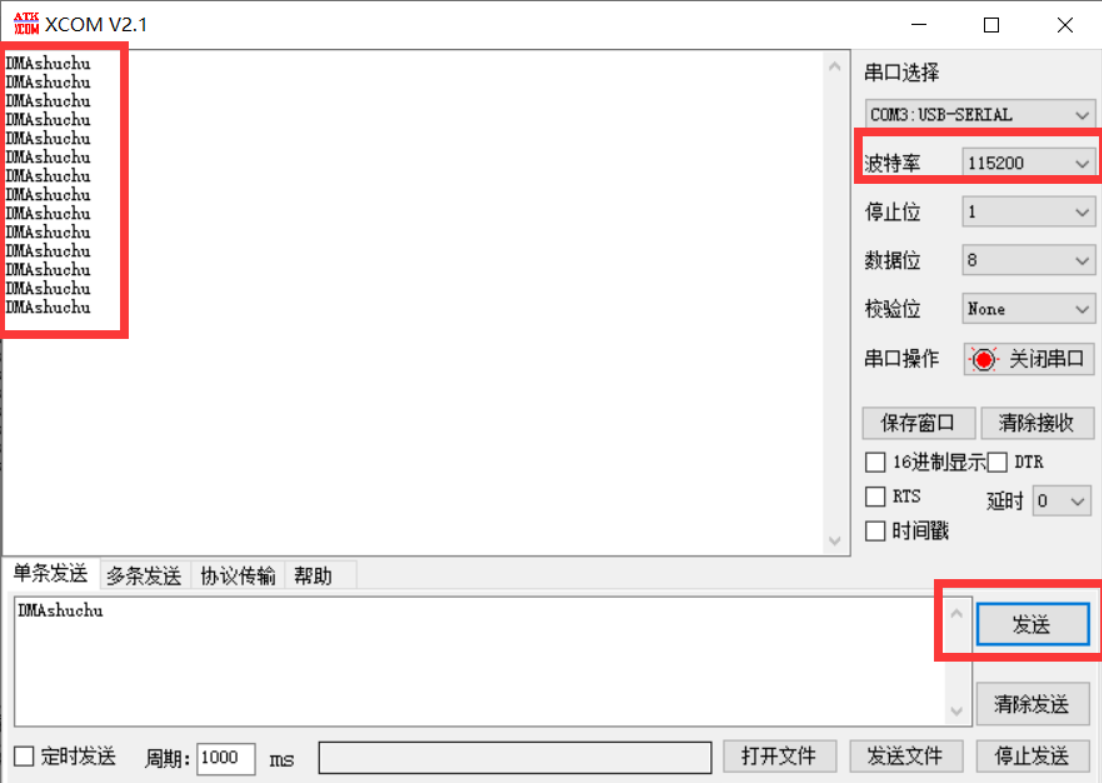
5. Test procedure
4, Summary
Through this experiment, it is found that interrupting the communication with serial port DMA can improve the operation efficiency of the program. DMA can directly access the memory without CPU. The burden of CPU is reduced. I am familiar with the basic functions of serial port communication and DMA communication.
5, Reference link
qq_ Blog of 60678931_ Laul Ken-Yi_CSDN blog