catalogue
2, Workspaces and feature packs
3, Programming implementation of publisher
4, Programming implementation of subscriber
1, Basic knowledge
- Topic -- asynchronous communication programming
-
An important bus used to transmit data between nodes;
-
use Publish / subscribe Model, the data is transmitted from the publisher to the subscriber, and the subscriber or publisher of the same topic can Not unique .
-
- Message -- topic data
- It has certain types and data structures, including standard types provided by ROS and user-defined types;
- Use the programming language independent. msg file definition to generate the corresponding code file during compilation.
- Service -- synchronous communication mechanism
- Using the client / server (C/S) model, the client sends the request data, and the server returns the response data after processing;
- The request and response data structures are defined by using the. srv file independent of the programming language, and the corresponding code files are generated during the compilation process.
- Parameter -- global shared dictionary
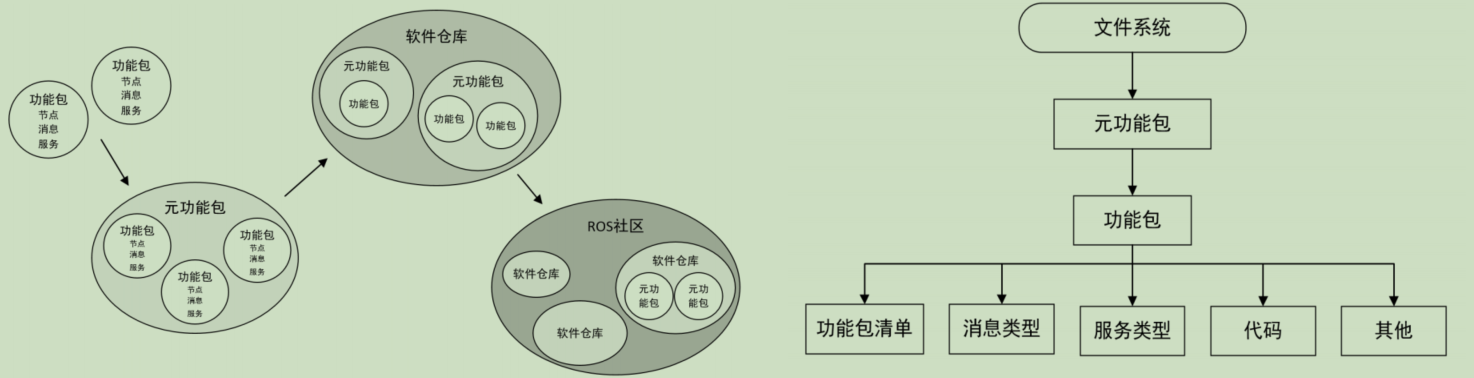
- Function package
- The basic unit in ROS software, including node source code, configuration file, data definition, etc.
- Package manifest
- Record the basic information of the function package, including author information, license information, dependency options, compilation flags, etc.
- Meta packages
- Organize multiple function packages for the same purpose
- ROS common commands (complete the commands with tab)
- roscore ------ start ROSMaster
- rosrun ------ run a node in the function package
-
// Function package name a node in the function package $rosrun turtlesim turtlesim_node
-
- rostopic
-
// 10 times a second (frequency) topic name message data type $rostopic pub -r 10 /turtle1/cmd_vel geometry_msgs/Twist "Message structure specific data" ros Speed in miles m/s,Angular velocity unit rad/s
-
- rosservice
-
//The terminal can request a service as a client $rosservice list //Publish service request $rosservice call/spawn "service content "
-
- rosnode
-
$rosnode list //View all topic nodes. Note: / rosout is the ros default topic $rosnode info /turtlesim //View the specific information of a node, such as which topics are published and which topics are subscribed to.
-
- rosparam
- rosmsg
- rossrv
- rqt_graph - visual tool to view the calculation diagram running in the system
- rosbag
-
//Topic record $rosbag record -a -O cmd_record //Topic recurrence $rosbag play cmd_record.bag
-
2, Workspaces and feature packs
Workspace:
- src: code space
- build: compile space
- devel: development space
- install: installation space
1. Create workspace
$mkdir -p ~/catkin_ws/src $cd ~/catkin/src $catkin_init_workspace
2. Compile workspace
$cd ~/catkin_ws/ $catkin_make //When generating the install space $catkin_make install
3. Set environment variables
$source devel/setup.bash
4. Check environment variables
$echo $ROS_PACKAGE_PATH
Feature Pack:
Note: the function package is the smallest unit to place the source code. You cannot directly place the source code in src.
1. Create function package
$cd ~/catkin_ws/src $catkin_create_pkg test_pkg std_msgs rospy roscpp
2. Compile function package
$cd ~/catkin_ws $catkin_make $source ~/catkin_ws/devel/setup.bash
3, Programming implementation of publisher
1. Create Feature Pack
$cd ~/catkin_ws/src $catkin_create_pkg learning_topic rosscpp rospy std_msgs geometry_msgs turtlesim
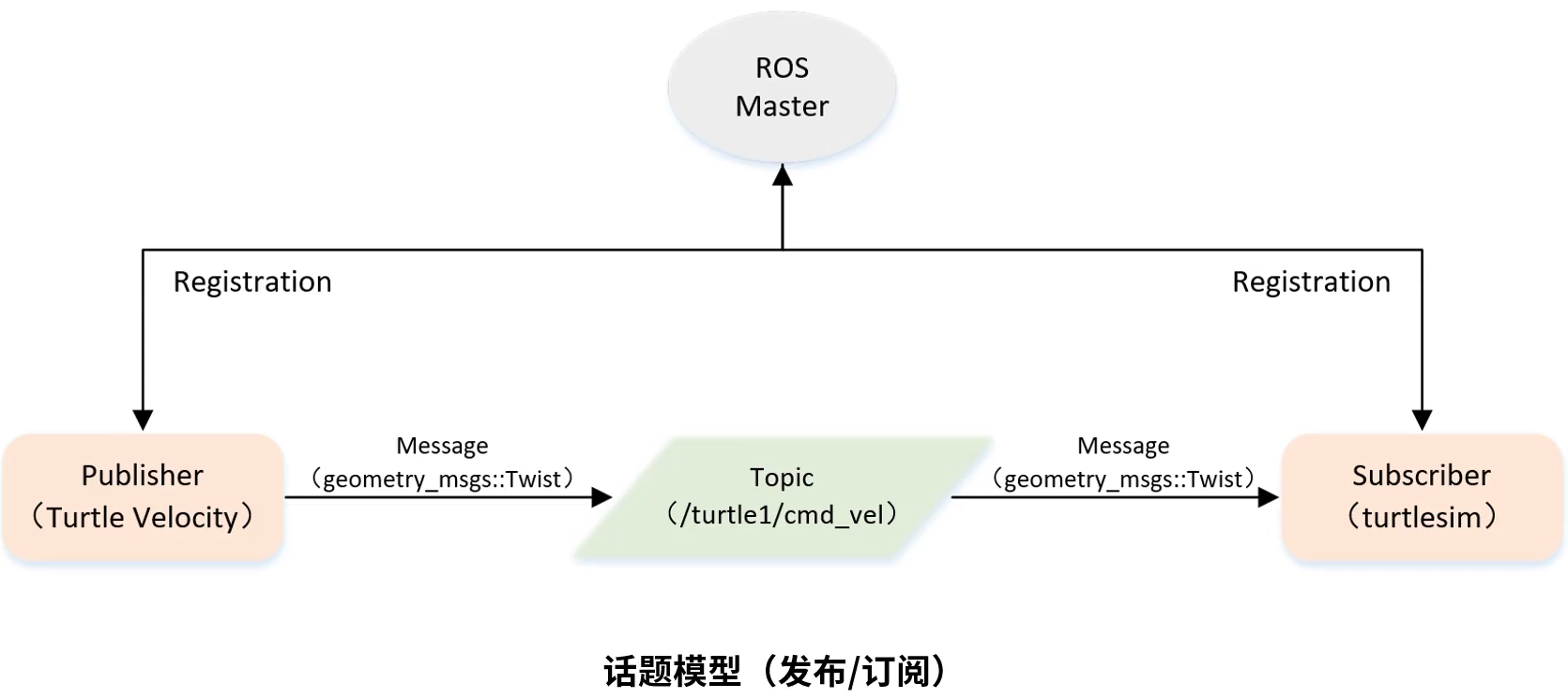
2. Create publisher
- Initialize ROS node
- Register the node information with the ROS Master, including the published topic name and the message type in the topic
- Create message data
- Circularly publish messages at a certain frequency
Put the prepared publisher's source code in ~ / catkin_ws/src/learning_topic/src
velocity_publisher.cpp
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
int main(int argc, char **argv)
{
// ROS node initialization
ros::init(argc, argv, "velocity_publisher");
// Create node handle
ros::NodeHandle n;
// Create a Publisher with the publication name / turnle1 / CMD_ The topic of vel and the message type is geometry_msgs::Twist, queue length 10
ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
// Sets the frequency of the cycle
ros::Rate loop_rate(10);
int count = 0;
while (ros::ok())
{
// Initialize geometry_msgs::Twist type message
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.5;
vel_msg.angular.z = 0.2;
// Release news
turtle_vel_pub.publish(vel_msg);
ROS_INFO("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]",
vel_msg.linear.x, vel_msg.angular.z);
// Delay according to cycle frequency
loop_rate.sleep();
}
return 0;
}Write Compilation Rules
- Set the code to be compiled and the generated executable
- Set up link library
CMakeLists.txt
#########
##build##
#########
add_executable(velocity_publisher src/velocity_publisher.cpp)
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})Compile and run publisher
$cd ~/catkin_ws $catkin_make //Environment variables must be set before executing the program $source devel/setup.bash $roscore $rosrun turtlesim turtlesim_node $rosrun learning_topic velocity_publisher
4, Programming implementation of subscriber
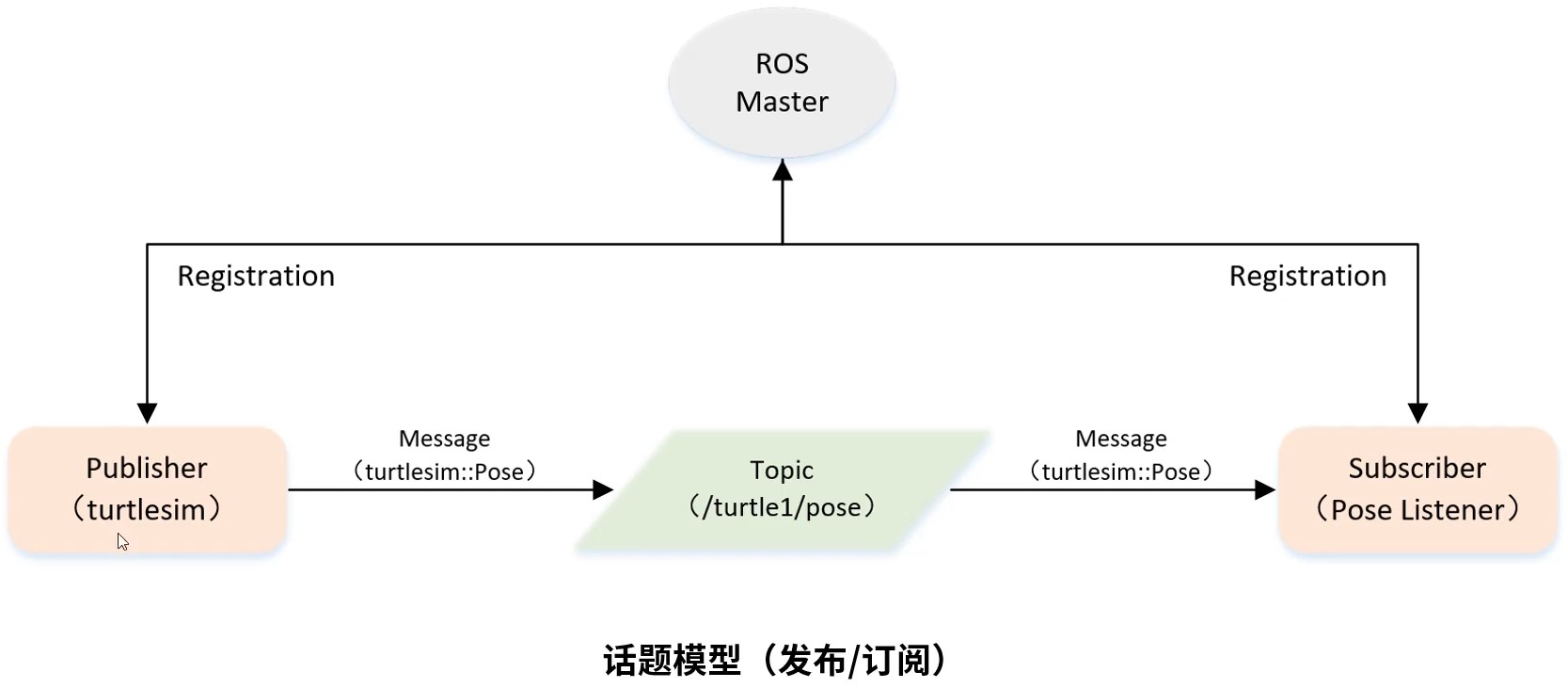
1. Implementation subscriber
- Initialize ROS node
- Subscribe to required topics
- The loop waits for the topic message and enters the callback function after receiving the message
- Complete message processing in callback function
pose_subscriber.cpp
/**
* This routine will subscribe to / turnle1 / pose topic, and the message type is turnlesim:: pose
*/
#include <ros/ros.h>
#include "turtlesim/Pose.h"
// After receiving the subscribed message, it will enter the message callback function
void poseCallback(const turtlesim::Pose::ConstPtr& msg)
{
// Print the received message
ROS_INFO("Turtle pose: x:%0.6f, y:%0.6f", msg->x, msg->y);
}
int main(int argc, char **argv)
{
// Initialize ROS node
ros::init(argc, argv, "pose_subscriber");
// Create node handle
ros::NodeHandle n;
// Create a Subscriber, subscribe to the topic named / turnle1 / pose, and register the callback function poseCallback
ros::Subscriber pose_sub = n.subscribe("/turtle1/pose", 10, poseCallback);
// Loop waiting callback function
ros::spin();
return 0;
}Write Compilation Rules
CMakeLists.txt
#########
##build##
#########
add_executable(pose_subscriber src/pose_subscriber.cpp)
target_link_libraries(pose_subscriber ${catkin_LIBRARIES})Compile and run publisher
$cd ~/catkin_ws $catkin_make //Environment variables must be set before executing the program $source devel/setup.bash $roscore $rosrun turtlesim turtlesim_node $rosrun learning_topic pose_subscriber
