Serial communication is a kind of communication mode between peripherals and computers, which transmits data bit by bit through data signal lines, ground lines, control lines, etc. This communication mode uses fewer data lines and can save communication cost in long distance communication, but its transmission speed is lower than that of parallel transmission. Serial port is a very general equipment communication protocol on computer. pyserial module encapsulates python's access to serial ports, providing a unified interface for the use of multiple platforms.
Installation:
pip3 install pyserial
Test:
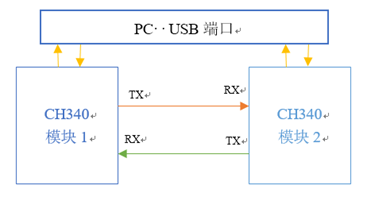
Two CH340 (TTL transfer serial module) are connected to PC serial port and interact with each other through Python:
Simple serial port program implementation:
import serial #Import module try: #Port, GNU / Linux Upper/ dev / ttyUSB0 Wait or Windows Upper COM3 etc. portx="COM3" #Baud rate, one of the standard values: 50,75,110,134,150,200,300,600,1200,1800,2400,4800,9600,19200,38400,57600,115200 bps=115200 #time-out,None: Always wait for the operation, 0 to return the request result immediately, and the other values are waiting time-out.(In seconds) timex=5 # Open the serial port and get the serial object ser=serial.Serial(portx,bps,timeout=timex) # Writing data result=ser.write("I'm Dong Xiaodong.".encode("gbk")) print("Write total bytes:",result) ser.close()#Close serial port except Exception as e: print("---abnormal---: ",e)
Get a list of available serial ports:
import serial #Import module import serial.tools.list_ports port_list = list(serial.tools.list_ports.comports()) print(port_list) if len(port_list) == 0: print('No Available Serial Port') else: for i in range(0,len(port_list)): print(port_list[i])
Hexadecimal processing:
import serial #Import module try: portx="COM3" bps=115200 #time-out,None: Always wait for the operation, 0 to return the request result immediately, and the other values are waiting time-out.(In seconds) timex=None ser=serial.Serial(portx,bps,timeout=timex) print("Serial details parameters:", ser) #Hexadecimal transmission result=ser.write(chr(0x06).encode("utf-8"))#Writing data print("Write total bytes:",result) #Hexadecimal Reading print(ser.read().hex())#Read a byte print("---------------") ser.close()#Close serial port except Exception as e: print("---abnormal---: ",e)
Additional details:
import serial #Import module try: #Port, GNU / Linux Upper/ dev / ttyUSB0 Wait or Windows Upper COM3 etc. portx="COM3" #Baud rate, one of the standard values: 50,75,110,134,150,200,300,600,1200,1800,2400,4800,9600,19200,38400,57600,115200 bps=115200 #time-out,None: Always wait for the operation, 0 to return the request result immediately, and the other values are waiting time-out.(In seconds) timex=5 # Open the serial port and get the serial object ser=serial.Serial(portx,bps,timeout=timex) print("Serial details parameters:", ser) print(ser.port)#Get the current open serial name print(ser.baudrate)#Obtaining baud rate result=ser.write("I'm Dong Xiaodong.".encode("gbk"))#Writing data print("Write total bytes:",result) #print(ser.read())#Read a byte # print(ser.read(10).decode("gbk"))#Read ten bytes #print(ser.readline().decode("gbk"))#Read a row #print(ser.readlines())#Read multiple rows, return list, must match timeout #print(ser.in_waiting)#Get the number of bytes remaining in the input buffer #print(ser.out_waiting)#Get the number of bytes in the output buffer #Loop receives data, which is a dead loop and can be implemented by threads while True: if ser.in_waiting: str=ser.read(ser.in_waiting ).decode("gbk") if(str=="exit"):#Exit sign break else: print("Data received:",str) print("---------------") ser.close()#Close serial port except Exception as e: print("---abnormal---: ",e)
Partial packaging:
The encapsulation method of reading data is not very useful, and it has to be received circularly, which makes it more complicated.
import serial #Import module import threading STRGLO="" #Read data BOOL=True #Read flag bit #Realization of Reading Code Ontology def ReadData(ser): global STRGLO,BOOL # Loop receives data, which is a dead loop and can be implemented by threads while BOOL: if ser.in_waiting: STRGLO = ser.read(ser.in_waiting).decode("gbk") print(STRGLO) #Open serial port # Port, GNU / Linux Upper/ dev / ttyUSB0 Wait or Windows Upper COM3 etc. # Baud rate, one of the standard values: 50,75,110,134,150,200,300,600,1200,1800,2400,4800,9600,19200,38400,57600,115200 # time-out,None: Always wait for the operation, 0 to return the request result immediately, and the other values are waiting time-out.(In seconds) def DOpenPort(portx,bps,timeout): ret=False try: # Open the serial port and get the serial object ser = serial.Serial(portx, bps, timeout=timeout) #Determine whether the opening is successful if(ser.is_open): ret=True threading.Thread(target=ReadData, args=(ser,)).start() except Exception as e: print("---abnormal---: ", e) return ser,ret #Close serial port def DColsePort(ser): global BOOL BOOL=False ser.close() #Writing data def DWritePort(ser,text): result = ser.write(text.encode("gbk")) # Writing data return result #Read data def DReadPort(): global STRGLO str=STRGLO STRGLO=""#Clear out the current read return str if __name__=="__main__": ser,ret=DOpenPort("COM6",115200,None) if(ret==True):#Determine whether the serial port is successfully opened count=DWritePort(ser,"I'm Dong Xiaodong, Haha.") print("Number of bytes written:",count) #DReadPort() #ReadComm #DColsePort(ser) #Close serial port