Keywords: contour detection, analysis, Hoff circle detection, circumscribed rectangle, circumscribed rotating rectangle, center point, multi deformation filling, target object detection and segmentation
Input:

Contour detection and analysis:
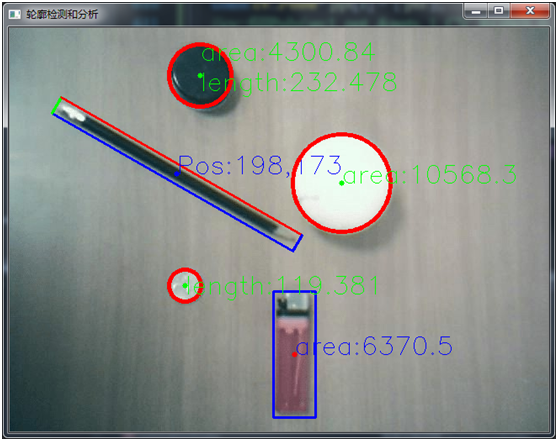
Including circle detection, position, center point, circumscribed rectangle, circumscribed rectangle, contour area, perimeter, rotation angle, etc.
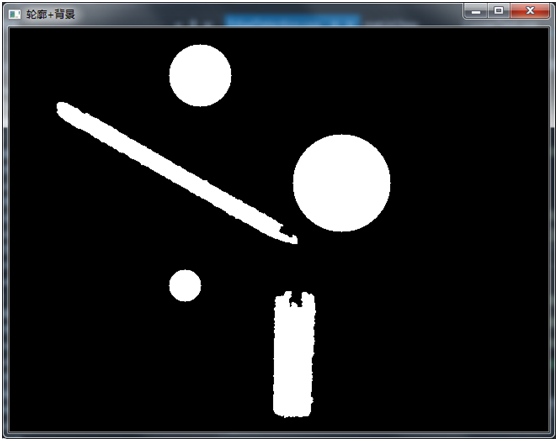
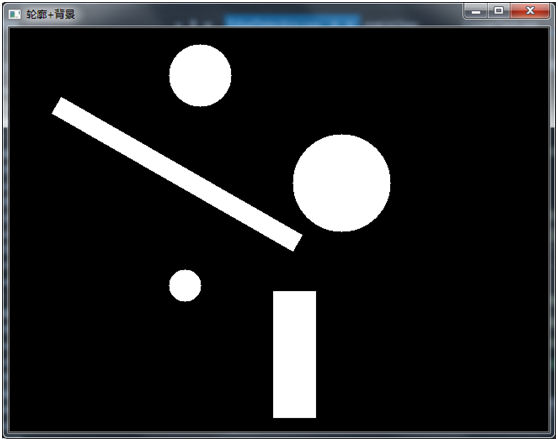
Contour background separation and extraction:
Method 2,
Target object detection and segmentation:
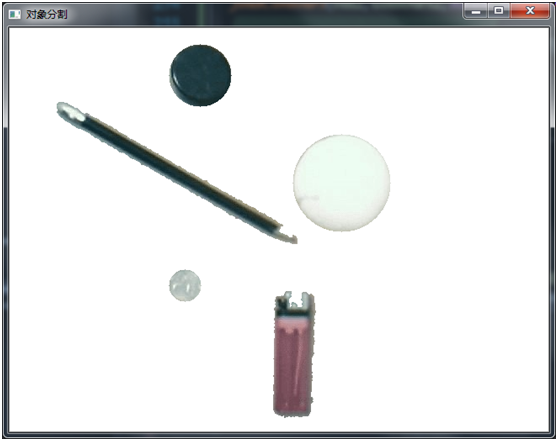
Method two,

Reference code,
void Test22()
{
//0: pencil; 1: lighter; 2: circle with shadow above; 3: big circle on the right; 4: small circle on the bottom left
vector<Point> contoursorder[5];
Mat src, srcback, srcback2, src_gray0, src_gray, binImg;
//1. Read in and test
src = imread("D:/images/stuff.jpg", 1);
srcback = imread("D:/images/stuff.jpg");
srcback2 = srcback.clone();
string str = "Hello, 2020!";
putText(srcback2, str, Point(100,200), FONT_HERSHEY_SIMPLEX, 2.0, Scalar(0, 0, 255), 2, 16);
imshow("src", srcback2);
waitKey(0);
Mat RoiSrcImg(src.rows, src.cols, CV_8UC3);
RoiSrcImg.setTo(255);//Color is set to white
//imshow("RoiSrcImg", RoiSrcImg);
//waitKey(0);
Mat RoiSrcImg0(src.rows, src.cols, CV_8UC3);
RoiSrcImg0.setTo(255);//Color is set to white
//declare and initialize both parameters that are subjects to change
int cannyThreshold = 21;
int accumulatorThreshold = 34;
cannyThreshold = std::max(cannyThreshold, 1);
accumulatorThreshold = std::max(accumulatorThreshold, 1);
Mat src1 = CalculateImageGradient(src, false);
//imshow("src1", src1);
//waitKey(0);
//////////////////////////////////////Find profile
////////////////////////////////////Grayscale
//src_gray = src1;
int iii = src1.channels();
cvtColor(src1, src_gray, COLOR_RGB2GRAY);
//2. Turn to grayscale, and blur to remove noise -- preprocessing
cvtColor(src, src_gray0, COLOR_BGR2GRAY);
GaussianBlur(src_gray0, src_gray0, Size(9, 9), 2, 2);
//Two valued
threshold(src_gray, binImg, 0, 255, THRESH_BINARY | THRESH_OTSU);
//imshow("bin", binImg);
//waitKey(0);
///////////////////////////////////
vector<vector<Point>> contours;
//vector<Rect> boundRect(contours.size());
//Note that the fifth parameter is CV? Retr? External, only retrieve the outline / / find the outline
findContours(binImg, contours, RETR_EXTERNAL, CHAIN_APPROX_NONE);
//////////////////////////////////////////////////////
cout << contours.size() << endl;
int iSeq = -1;
for (int i = 0; i < contours.size(); i++)
{
double area = contourArea(contours[i]);
double len = arcLength(contours[i], true);
if (area > 1000)// continue;
{
if (area > 6300 && area < 6400)
{
contoursorder[1] = contours[i];
Rect recttt = boundingRect(Mat(contours[i]));
rectangle(src, recttt, (0, 0, 255), 2, 8, 0);
//cv::drawContours(RoiSrcImg, contours, i, Scalar(0), FILLED);
rectangle(RoiSrcImg, recttt,Scalar(0), -1);
//imshow("RoiSrcImg1", RoiSrcImg);
//waitKey(0);
cv::RotatedRect &&rotate_rect = cv::minAreaRect(contours[i]);
circle(src, rotate_rect.center, 3, Scalar(0, 0, 255), -1, 8, 0);
string strarea = "area:" + doubleConverToString(area);
putText(src, strarea, rotate_rect.center, FONT_HERSHEY_SIMPLEX, 1.0, Scalar(255, 0, 0), 1, 8);
}
else if (area > 5900 && area < 6000)
{
contoursorder[0] = contours[i];
//cv::drawContours(RoiSrcImg, contours, i, Scalar(0), FILLED);
DrawCircumscribedRectangle2(src, RoiSrcImg,contours[i]);
}
else
{
//Parameters: src [gray], src [display], canny threshold, accumulation threshold
HoughDetection2(src_gray0, src, RoiSrcImg,cannyThreshold, accumulatorThreshold);
}
}
else
{
drawContours(binImg, contours, i, Scalar(0), FILLED);
}
}
bitwise_not(RoiSrcImg, RoiSrcImg);
imshow("outline+background", RoiSrcImg);
waitKey(0);
}Hoff circle test reference code,
void HoughDetection2(const Mat& src_gray, const Mat& src_display, Mat& src_display2, int cannyThreshold, int accumulatorThreshold)
{
//Detection result vector
std::vector<Vec3f> circles;
//Hoff circle test
//Parameters: src, output array, Hoff gradient, dp?, minimum center distance, Canny threshold, accumulation threshold
HoughCircles(src_gray, circles, HOUGH_GRADIENT, 1, src_gray.rows / 8, cannyThreshold, accumulatorThreshold, 0, 0);
Mat display = src_display.clone();
for (size_t i = 0; i < circles.size(); i++)
{
//Center -(x,y)
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
//Radius - r
int radius = cvRound(circles[i][2]);
Point ptlt, ptlb, ptrb, ptrt;
ptlt.x = circles[i][0] - radius;
ptlt.y = circles[i][1] - radius;
//////////////////////////////////////////////////////
ptlb.x = circles[i][0] - radius;
ptlb.y = circles[i][1] + radius;
/////////////////////////////////////////////////////
ptrb.x = circles[i][0] + radius;
ptrb.y = circles[i][1] + radius;
/////////////////////////////////////////////////////
ptrt.x = circles[i][0] + radius;
ptrt.y = circles[i][1] - radius;
/////////////////////////////////////////////////////
//Central circle
circle(display, center, 3, Scalar(0, 255, 0), -1, 8, 0);
if (0 == i)
{
//Outer circle
circle(display, center, radius, Scalar(0, 0, 255), 3, 8, 0);
circle(src_display2, center, radius, Scalar(0, 0, 0), -1);
//rectangle(display, ptlt, ptrb, Scalar(0, 0, 255), 2, 8, 0);
double darea = PI * radius*radius;
string strarea = "area:" + doubleConverToString(darea);
double dlength = 2 * PI*radius;
string strperimeter = "length:" + doubleConverToString(dlength);
putText(display, strarea, Point(cvRound(circles[i][0]), cvRound(circles[i][1])), FONT_HERSHEY_SIMPLEX, 1.0, Scalar(0, 255, 0), 1, 8);
//putText(display, strperimeter, Point(cvRound(circles[i][0]), cvRound(circles[i][1] + radius / 2)), FONT_HERSHEY_SIMPLEX, 1.0, Scalar(0, 255, 0), 1, 8);
}
else if (1 == i)
{
//Outer circle
circle(display, center, radius, Scalar(0, 0, 255), 3, 8, 0);
circle(src_display2, center, radius, Scalar(0, 0, 0), -1);
//rectangle(display, ptlt, ptrb, Scalar(0, 0, 255), 2, 8, 0);
double darea = PI * radius*radius;
string strarea = "area:" + doubleConverToString(darea);
double dlength = 2 * PI*radius;
string strperimeter = "length:" + doubleConverToString(dlength);
putText(display, strarea, Point(cvRound(circles[i][0]), cvRound(circles[i][1] - radius / 2)), FONT_HERSHEY_SIMPLEX, 1.0, Scalar(0, 255, 0), 1, 8);
putText(display, strperimeter, Point(cvRound(circles[i][0]), cvRound(circles[i][1] + radius / 2)), FONT_HERSHEY_SIMPLEX, 1.0, Scalar(0, 255, 0), 1, 8);
}
else if (2 == i)
{
//Outer circle
circle(display, center, radius, Scalar(0, 0, 255), 3, 8, 0);
circle(src_display2, center, radius, Scalar(0, 0, 0), -1);
//rectangle(display, ptlt, ptrb, Scalar(0, 0, 255), 2, 8, 0);
double darea = PI * radius*radius;
string strarea = "area:" + doubleConverToString(darea);
double dlength = 2 * PI*radius;
string strperimeter = "length:" + doubleConverToString(dlength);
//putText(display, strarea, Point(cvRound(circles[i][0]), cvRound(circles[i][1] - radius / 2)), FONT_HERSHEY_SIMPLEX, 1.0, Scalar(0, 255, 0), 1, 8);
putText(display, strperimeter, Point(cvRound(circles[i][0]), cvRound(circles[i][1] + radius / 2)), FONT_HERSHEY_SIMPLEX, 1.0, Scalar(0, 255, 0), 1, 8);
}
else
{
}
}
imshow("Contour detection and analysis", display);
waitKey(0);
destroyAllWindows();
}


Published 201 original articles, won praise 159, visited 630000+