Detect shapes in images
Image to grayscale, binarization, contour extraction, contour and center of gravity drawing
During binarization, it is determined whether to reverse according to the image

import cv2 as cv import numpy as np img = cv.imread('tooth.png') img = cv.imread('num.jpg') gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY) gray = cv.GaussianBlur(gray, (3, 3), 0) cv.imshow('gray', gray) ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY | cv.THRESH_OTSU | cv.THRESH_BINARY_INV ) cv.imshow('binary', binary) clone_img, contours, heriachy = cv.findContours( binary, # cv.RETR_TREE, # Find all cv.RETR_EXTERNAL, # External contour cv.CHAIN_APPROX_SIMPLE, ) for i, contour in enumerate(contours): # Calculate contour area area = cv.contourArea(contour) # External rectangle x, y, w, h = cv.boundingRect(contour) # Geometric moments mm = cv.moments(contour) # Focus cx = int(mm['m10'] / mm['m00']) cy = int(mm['m01'] / mm['m00']) # Visualize center of gravity and contour rectangles cv.circle(img, (cx, cy), 5, (0, 0, 0), -1) cv.rectangle(img, (x, y), (x + w, y + h), (0, 0, 255), 2) cv.imshow('ret', img) cv.waitKey(0)
Detect the image shape according to the extracted contour
approxPolyDP uses line segments to approach images. Generally, regular images can be detected. Note that noise needs to be removed in advance
In binarization, some information may be lost, so you need to choose the appropriate threshold


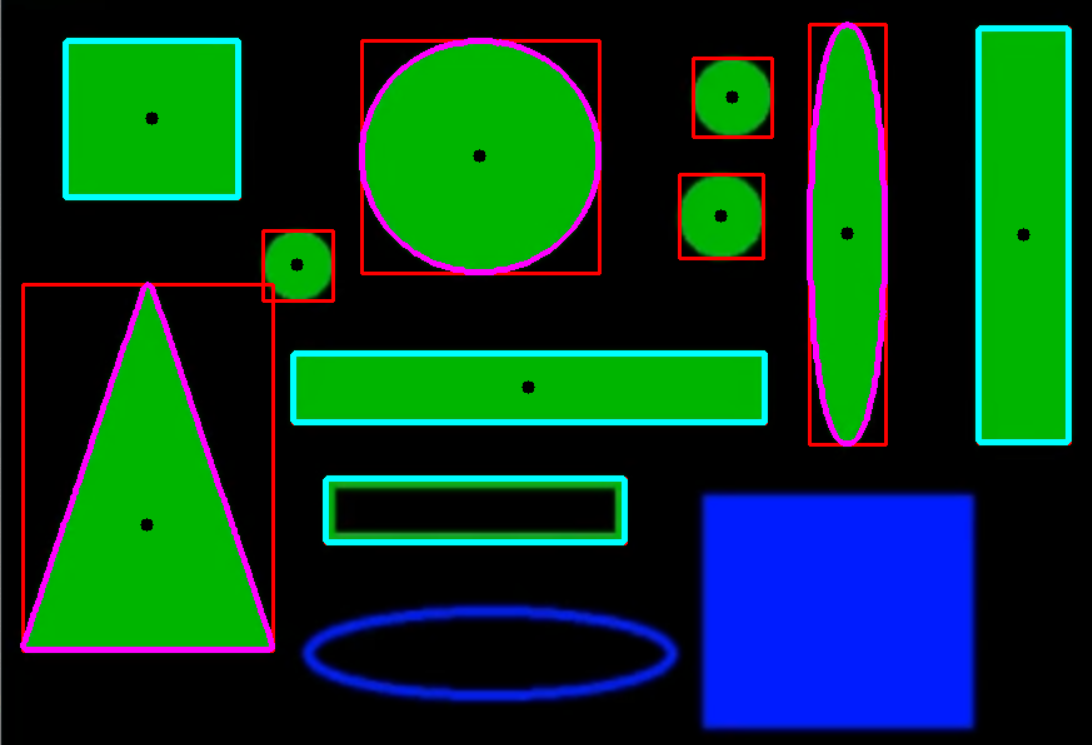
import cv2 as cv import numpy as np img = cv.imread('tooth.png') img = cv.imread('num.jpg') img = cv.imread('shape2.jpg') gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY) gray = cv.GaussianBlur(gray, (3, 3), 0) cv.imshow('gray', gray) ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY | cv.THRESH_OTSU # | cv.THRESH_BINARY_INV ) cv.imshow('binary', binary) clone_img, contours, heriachy = cv.findContours( binary, # cv.RETR_TREE, # Find all cv.RETR_EXTERNAL, # External contour cv.CHAIN_APPROX_SIMPLE, ) for i, contour in enumerate(contours): # Calculate contour area area = cv.contourArea(contour) # External rectangle x, y, w, h = cv.boundingRect(contour) # Geometric moments mm = cv.moments(contour) # Focus cx = int(mm['m10'] / mm['m00']) cy = int(mm['m01'] / mm['m00']) # Visualize center of gravity and contour rectangles cv.circle(img, (cx, cy), 5, (0, 0, 0), -1) cv.rectangle(img, (x, y), (x + w, y + h), (0, 0, 255), 2) approxCurve = cv.approxPolyDP(contour, 5, True) print(approxCurve.shape) # Pentagon if approxCurve.shape[0] == 3: cv.drawContours(img, contours, i, [255, 0, 255], 4) # Triangle if approxCurve.shape[0] == 4: cv.drawContours(img, contours, i, [255, 255, 0], 4) # circular if approxCurve.shape[0] > 9: cv.drawContours(img, contours, i, [255, 0, 255], 4) cv.imshow('ret', img) cv.waitKey(0)