Fourier concept
Introduction to Fourier
- Fourier transform, which means that a function satisfying certain conditions can be expressed as a trigonometric function (sine and / or cosine function) or a linear combination of their integrals. In different research fields, Fourier transform has many different variants, such as Continuous Fourier transform and discrete Fourier transform. Initially, Fourier analysis was proposed as a tool for analytical analysis of thermal processes. (refer to Baidu Encyclopedia).
- Generally speaking, we live in a world of time. We get up at 7:00 in the morning, have breakfast at 7:30, go to school at 8:00, finish class at 12:00 and so on. Taking time as a reference is time domain analysis. But in the frequency domain, everything is static! You can refer to this link The concept of Fourier can be understood in a popular way.
Function of Fourier transform
- The role of Fourier in OpenCV:
- High frequency: grayscale components that change dramatically, such as boundaries.
- Low frequency: a gray component that changes slowly, such as a sea.
Fourier filtering
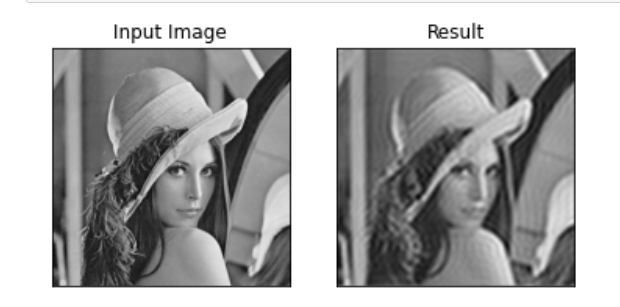
- Low pass filter: only low frequency (gentle amplitude) is retained, which will blur the image.
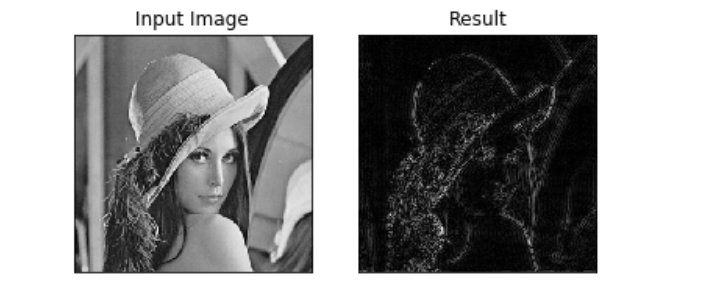
- High pass filter: only high frequency is reserved (the amplitude is intense), which will enhance the image details.
Practical application of OpenCV Fourier transform
Function introduction
- opencv mainly includes cv2.dft() and cv2.idft(). The input image needs to be converted into np.float32 format first.
- In the obtained results, the part with frequency 0 will be in the upper left corner, which usually needs to be converted to the central position, which can be realized by shift transformation.
- The result returned by cv2.dft() is dual channel (real part and imaginary part), which usually needs to be converted into image format to display (0255).
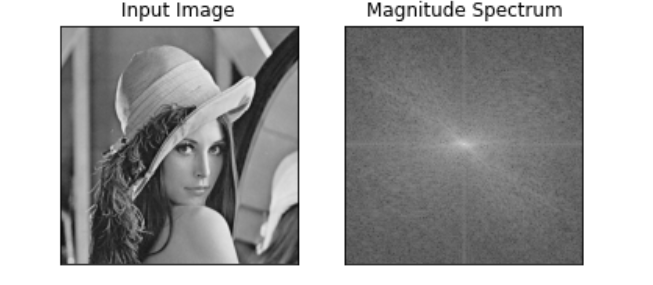
Code presentation
import numpy as np
import cv2
from matplotlib import pyplot as plt
img = cv2.imread('lena.jpg',0)
img_float32 = np.float32(img)
dft = cv2.dft(img_float32, flags = cv2.DFT_COMPLEX_OUTPUT)
dft_shift = np.fft.fftshift(dft)
# Get the form that the gray image can represent
magnitude_spectrum = 20*np.log(cv2.magnitude(dft_shift[:,:,0],dft_shift[:,:,1]))
plt.subplot(121),plt.imshow(img, cmap = 'gray')
plt.title('Input Image'), plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(magnitude_spectrum, cmap = 'gray')
plt.title('Magnitude Spectrum'), plt.xticks([]), plt.yticks([])
plt.show()
- Low pass filtering effect display
import numpy as np
import cv2
from matplotlib import pyplot as plt
img = cv2.imread('lena.jpg',0)
img_float32 = np.float32(img)
dft = cv2.dft(img_float32, flags = cv2.DFT_COMPLEX_OUTPUT)
dft_shift = np.fft.fftshift(dft)
rows, cols = img.shape
crow, ccol = int(rows/2) , int(cols/2) # Center position
# Low pass filtering: when outputting detailed features, the outline will appear blurred. When creating a mask, it needs to be centered to 1 and surrounded by a mask matrix of 0.
mask = np.zeros((rows, cols, 2), np.uint8)
mask[crow-30:crow+30, ccol-30:ccol+30] = 1
# IDFT
fshift = dft_shift*mask
f_ishift = np.fft.ifftshift(fshift)
img_back = cv2.idft(f_ishift)
img_back = cv2.magnitude(img_back[:,:,0],img_back[:,:,1])
plt.subplot(121),plt.imshow(img, cmap = 'gray')
plt.title('Input Image'), plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(img_back, cmap = 'gray')
plt.title('Result'), plt.xticks([]), plt.yticks([])
plt.show()
- High pass filtering effect display
img = cv2.imread('lena.jpg',0)
img_float32 = np.float32(img)
dft = cv2.dft(img_float32, flags = cv2.DFT_COMPLEX_OUTPUT)
dft_shift = np.fft.fftshift(dft)
rows, cols = img.shape
crow, ccol = int(rows/2) , int(cols/2) # Center position
# High pass filtering: output contour features, remove details, and create a mask matrix centered at 0 and surrounded by 1.
mask = np.ones((rows, cols, 2), np.uint8)
mask[crow-30:crow+30, ccol-30:ccol+30] = 0
# IDFT
fshift = dft_shift*mask
f_ishift = np.fft.ifftshift(fshift)
img_back = cv2.idft(f_ishift)
img_back = cv2.magnitude(img_back[:,:,0],img_back[:,:,1])
plt.subplot(121),plt.imshow(img, cmap = 'gray')
plt.title('Input Image'), plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(img_back, cmap = 'gray')
plt.title('Result'), plt.xticks([]), plt.yticks([])
plt.show()