Written in front
In the last article, I recorded the driver of Kinect2 installed in Ubuntu and the bridge running in ROS. Now I can't wait to run the RGB-D interface under ORB-SLAM2.
Modify ORB-SLAM2
After installing the Kinect2 driver, execute:
roslaunch kinect_bridge kinect_bridge.launch
Then execute the following command to query the topics released by ROS
rostopic list
The topics are as follows:
/kinect2/bond /kinect2/hd/camera_info /kinect2/hd/image_color /kinect2/hd/image_color/compressed /kinect2/hd/image_color_rect /kinect2/hd/image_color_rect/compressed /kinect2/hd/image_depth_rect /kinect2/hd/image_depth_rect/compressed /kinect2/hd/image_mono /kinect2/hd/image_mono/compressed /kinect2/hd/image_mono_rect /kinect2/hd/image_mono_rect/compressed /kinect2/hd/points /kinect2/qhd/camera_info /kinect2/qhd/image_color /kinect2/qhd/image_color/compressed /kinect2/qhd/image_color_rect /kinect2/qhd/image_color_rect/compressed /kinect2/qhd/image_depth_rect /kinect2/qhd/image_depth_rect/compressed /kinect2/qhd/image_mono /kinect2/qhd/image_mono/compressed /kinect2/qhd/image_mono_rect /kinect2/qhd/image_mono_rect/compressed /kinect2/qhd/points /kinect2/sd/camera_info /kinect2/sd/image_color_rect /kinect2/sd/image_color_rect/compressed /kinect2/sd/image_depth /kinect2/sd/image_depth/compressed /kinect2/sd/image_depth_rect /kinect2/sd/image_depth_rect/compressed /kinect2/sd/image_ir /kinect2/sd/image_ir/compressed /kinect2/sd/image_ir_rect /kinect2/sd/image_ir_rect/compressed /kinect2/sd/points /rosout /rosout_agg
Use / kinect2 / QHD / image? Color and / kinect2 / QHD / image? Depth? Rect here.
Open orb? Slam2 / example / ROS / orb? Slam2 / SRC / ROS? Rgbd.cc, and modify the corresponding statement to:
message_filters::Subscriber<sensor_msgs::Image> rgb_sub(nh,"/kinect2/qhd/image_color",1); message_filters::Subscriber<sensor_msgs::Image> depth_sub(nh,"/kinect2/qhd/image_depth_rect",1);
2. Kinect 2 Calibration
Reference resources https://github.com/code-iai/iai_kinect2/tree/master/kinect2_calibration#calibrating-the-kinect-one Calibrate Kinect2, obtain the internal distortion coefficient, and create kinect2.yaml under Examples/RGB-D /. Refer to Examples/RGB-D/TUM1.yaml, and modify the corresponding parameters.
# Camera calibration and distortion parameters (OpenCV) Camera.fx: 1050.6 Camera.fy: 1051.3 Camera.cx: 938.0 Camera.cy: 554.4 Camera.k1: 0.0 Camera.k2: 0.0 Camera.p1: 0.0 Camera.p2: 0.0 Camera.width: 1920 Camera.height: 1080 # Camera frames per second Camera.fps: 30.0
Finally, execute the following command to start ORB-SLAM2.
rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.txt Examples/RGB-D/kinect2.yaml
3. Compile the build ros.sh script file
Configure the ROS package path environment variable
source ~/.zshrc
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/xuzifeng/ORB_SLAM2/Examples/ROS
Enter the orb slam2 main path to compile the ros node:
chmod +x build_ros.sh ./build_ros.sh
To ensure that the original program can be compiled, I encountered the following problems during the compilation phase:
/usr/bin/ld: CMakeFiles/RGBD.dir/src/ros_rgbd.cc.o: undefined reference to symbol '_ZN5boost6system15system_categoryEv'
-The reason for the error is: libboost? System.so and libboost? Filesystem.so cannot find the linked directory
-The solution is:
locate boost_system
//Directory found
/usr/lib/x86_64-linux-gnu/libboost_system.a /usr/lib/x86_64-linux-gnu/libboost_system.so /usr/lib/x86_64-linux-gnu/libboost_system.so.1.58.0
locate boost_filesystem
//Directory found
/usr/lib/x86_64-linux-gnu/libboost_filesystem.a /usr/lib/x86_64-linux-gnu/libboost_filesystem.so /usr/lib/x86_64-linux-gnu/libboost_filesystem.so.1.58.0
Copy libboost ﹣ system.so and libboost ﹣ filesystem.so to orb ﹣ slam2 / lib, and add the stock in directory to Cmakelists.txt under orb ﹣ slam2 / examples / ROS / orb ﹣ slam2. Before modification, it is as follows:
set(LIBS
${OpenCV_LIBS}
${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${PROJECT_SOURCE_DIR}/../../../Thirdparty/DBoW2/lib/libDBoW2.so
${PROJECT_SOURCE_DIR}/../../../Thirdparty/g2o/lib/libg2o.so
${PROJECT_SOURCE_DIR}/../../../lib/libORB_SLAM2.so
)
After that, add - lboost Gu system, and modify CMakeLists.txt
set(LIBS
${OpenCV_LIBS}
${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${PROJECT_SOURCE_DIR}/../../../Thirdparty/DBoW2/lib/libDBoW2.so
${PROJECT_SOURCE_DIR}/../../../Thirdparty/g2o/lib/libg2o.so
${PROJECT_SOURCE_DIR}/../../../lib/libORB_SLAM2.so
-lboost_system
)4. Recompile project
//Recompile project chmod +x build_ros.sh ./build_ros.sh
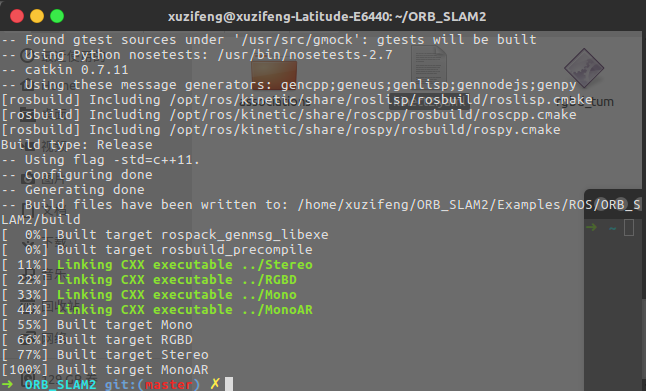
Compilation succeeded!! The next step is to start the driver and bridge of Kinect 2 and run Examples/ROS/RBGD
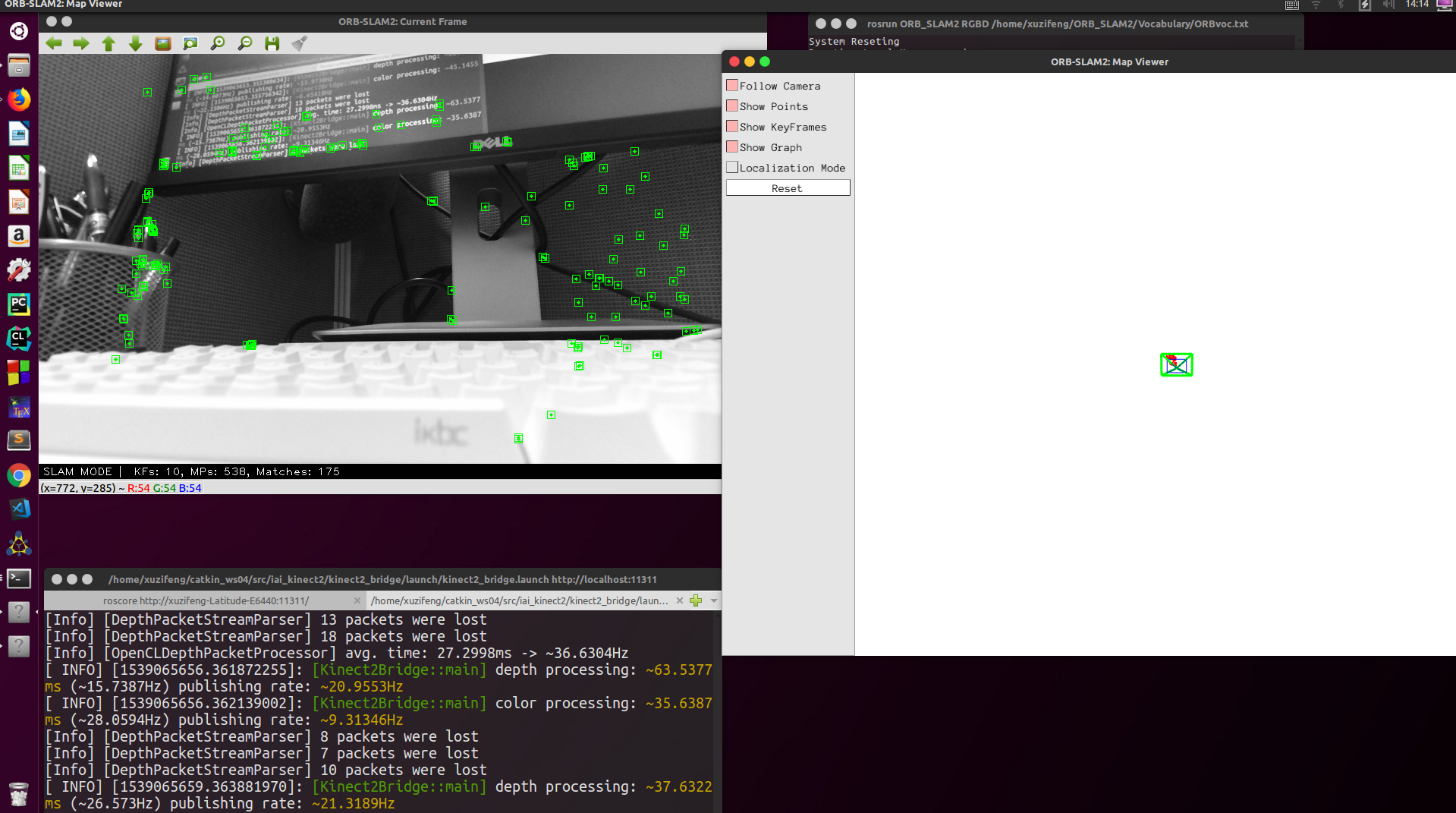
5. Operation procedure
Open a terminal and run:
roscore //Open a new terminal. I have set the starting path of ROS here. I don't need source devel/setup.sh roslaunch kinect2_bridge kinect2_bridge.launch
Then cd to orb slam2 / examples / ROS / orb slam2 path to open a new terminal input:
rosrun ORB_SLAM2 RGBD /home/xuzifeng/ORB_SLAM2/Vocabulary/ORBvoc.txt /home/xuzifeng/ORB_SLAM2/Examples/RGB-D/kinect2.yaml
Run successfully!!!