Median segmentation
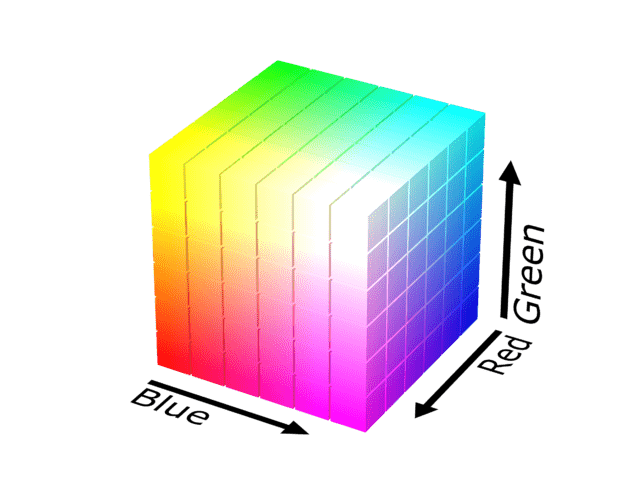
In RGB color space, the three primary colors R, G and B correspond to three coordinate axes of the space, and each coordinate axis is quantized to 0-255. 0 corresponds to all black and 255 corresponds to all white. In this way, a color cube with 256 sides is formed, and all possible colors correspond to a point on the cube.
Algorithm steps
- Turn the picture into rgb histogram, and you can imagine a color block in the space, which is R-axis, G-axis and B-axis respectively.
- Find the longest axis and sort with the longest axis.
- Divide the color block into two according to the sorted results.
- Continue the two color blocks obtained in step 3 to step 234 until the number of color blocks reaches the number k of extracted colors.
- Get k color blocks, and count the pixel RGB mean value of each color block, that is, the final extracted color result.
realization
# k is the extracted chromatic number
def medianSegmentation(imgPath, k = 256):
# Read picture
img = cv2.imdecode(np.fromfile(imgPath, dtype=np.uint8), -1)
img = np.array(img)
# 3D to 2D
img = img.reshape((-1, img.shape[2]))
# queue
que = Queue()
# Join the team
que.put(img)
# Do not stop until the cutting quantity reaches k
while que.qsize() < k:
# Color block
img = que.get()
# Find the largest axis in rgb
selectColor = 0
selectDifference = 0
for i in range(3):
selectMinVal = np.min(img[:, i])
selectMaxVal = np.max(img[:, i])
if selectMaxVal - selectMinVal > selectDifference:
selectColor = i
selectDifference = selectMaxVal - selectMinVal
# Sort using the largest axis
sortedIndexs = np.lexsort((img[:, selectColor], ))
img = img[sortedIndexs, :]
# segmentation
leftImg = img[:img.shape[0]//2, :]
rightImg = img[img.shape[0]//2:, :]
# Queue
que.put(leftImg)
que.put(rightImg)
# Extract color
colors = []
while not que.empty():
# Color block
img = que.get()
# Take pixel mean
colors.append(np.mean(img, axis=0))
# Display color block
showColors = np.zeros(shape=(len(colors) * 20, 200, 3), dtype=np.uint8)
for i in range(k):
showColors[i*20: i*20+20, :, :] = colors[i]
cv2.imshow("", showColors)
cv2.waitKey(0)
optimization
- Because the sorting algorithm is carried out after each color block segmentation, the performance is very poor. Therefore, RGB can be sorted once and optimized in some ways.
- In terms of memory, repetition opens up space; It can be integrated and optimized in combination with the first point.
- Some articles say that VBox may have a large volume but only contain a small number of pixels under some conditions. The solution is that each time you perform segmentation, you do not segment all the VBox obtained from the last segmentation, but sort through a priority queue. At the beginning, this queue takes VBox only the number of pixels contained in VBox as the priority. When the number of segmentation times becomes more, you take volume * the number of pixels contained in VBox as the priority. VBox is the color block described in this article.
Octree
Its time complexity and space complexity have great advantages, and the fidelity is also very high. Excerpt from this paragraph Image theme color extraction algorithm , the experimental results show that the time complexity is large.
Algorithm principle
The description of the algorithm is complex. Its principle is to convert the RGB of color into binary. The binary form is xxxx xxxx, and each column of the 8-bit binary form of RGB is bonded. For example:
R: 0100 1010 G: 0101 0100 B: 0010 0101
The bonded list is:
level0: 000 corresponding index Is 0, Namely in-1 Layer node children[0] level1: 110 corresponding index For 6, That is, at the node of layer 0 children[0]->children[6] level2: 001 corresponding index Is 1, That is, at the node of layer 0 children[0]->children[6]->children[1] level3: 010 corresponding index For 2, That is, at the node of layer 0 children[0]->children[6]->children[1]->children[2] level4: 100 corresponding index For 4, That is, at the node of layer 0 children[0]->children[6]->children[1]->children[2]->children[4] level5: 011 corresponding index For 3, That is, at the node of layer 0 children[0]->children[6]->children[1]->children[2]->children[4]->children[3] level6: 100 corresponding index For 4, That is, at the node of layer 0 children[0]->children[6]->children[1]->children[2]->children[4]->children[3]->children[4] level7: 001 corresponding index Is 1, That is, at the node of layer 0 children[0]->children[6]->children[1]->children[2]->children[4]->children[3]->children[4]->children[1]
For details, please refer to the following two articles: Image theme color extraction algorithm,Octree color quantization.
realization
# Constant class
class Const(object):
MAX_LEVEL = 8
# Color class
class Color(object):
# Color constructor
def __init__(self, r, g, b):
self.r = r
self.g = g
self.b = b
# Color addition
def add(self, color):
self.r += color.r
self.g += color.g
self.b += color.b
# Color division
def div(self, k):
if k == 0:
raise Exception("error color div zero.")
return Color(self.r // k, self.g // k, self.b // k)
# According to the octree principle, we can get which children are
def getIndex(self, level):
r = "{0:08b}".format(self.r)[level]
g = "{0:08b}".format(self.g)[level]
b = "{0:08b}".format(self.b)[level]
return int(''.join([r, g, b]), 2)
def __str__(self):
return "Color({0}, {1}, {2})".format(self.r, self.g, self.b)
def __repr__(self):
return str(self)
# Octree node class
class Node(object):
# Node constructor
def __init__(self, level, parent):
self.color = Color(0, 0, 0) # Node color
self.level = level # level to which the node belongs
self.children = [None for i in range(8)] # children owned by node
self.pixedCount = 0 # Number of the same color
if level < Const.MAX_LEVEL - 1: # If the node level is 7, it will not enter the octree levels linked list
parent.addLevelNode(level + 1, self) # Since the level of the root node is - 1, the + 1 operation is performed
# Recursively create a Color path to the leaf node
def addColor(self, color, level, parent):
if level < Const.MAX_LEVEL: # level less than 8
index = color.getIndex(level) # The level is from 0 to 7, which is the index obtained by obtaining the rgb code of each column
if self.children[index] is None: # The corresponding child has not been created yet
self.children[index] = Node(level, parent) # Create a child node and place it in the index position
self.children[index].addColor(color, level + 1, parent) # Recursive level to the next level
else: # Level reaches the 8th level, which is the leaf node
self.color.add(color) # Layer 8 does not need to create a Node, but directly accumulates the color of layer 7
self.pixedCount += 1 # Accumulate the number of color s on layer 7
# Get leaf nodes including itself and children
def leafNodes(self):
leafNodes = [] # Record leaf node
if self.isLeaf():
leafNodes.append(self) # append leaf node
else:
for node in self.children: # Traversal subtree
if not node is None:
leafNodes = leafNodes + node.leafNodes() # Get the leaf node of the subtree
return leafNodes # Return leaf node
# Is it a leaf node
def isLeaf(self):
return self.pixedCount > 0 # If the PixedCound of the Node is greater than 0, it indicates that it is a leaf Node
# Merge child nodes (this operation needs to be called externally from level=7, that is, from the leaf node to the root node; in this process, the leaf (child) node of node A is merged, and node A becomes A leaf node)
def reduce(self):
reduceCount = 0 # Number of merged leaf nodes
for node in self.children: # Traversal child
if not node is None:
self.color.add(node.color) # Adds leaf node color values to the parent node
self.pixedCount += node.pixedCount # Add the number of leaf node pixels to the parent node
reduceCount += 1 # Merge count
self.children = [None for i in range(8)] # Abandon the child
return reduceCount - 1 # Since its own Node becomes a leaf Node, + 1
# The Color value on the Node
def normalize(self):
return self.color.div(self.pixedCount) # Mean Color
# Octree algorithm
class Octree(object):
# Octree constructor
def __init__(self):
self.levels = [[] for i in range(Const.MAX_LEVEL)] # Build a levels linked list for subsequent extraction of color theme colors
self.root = Node(-1, self) # root node
# Add Node to the levels linked list
def addLevelNode(self, level, node):
self.levels[level].append(node)
# Add color to octree
def addColor(self, color):
self.root.addColor(color, 0, self)
# Extract color
def extractColor(self, k = 256):
leafCount = len(self.root.leafNodes()) # Get the number of octree leaf nodes
for i in range(Const.MAX_LEVEL, 0, -1): # Traverse from level 7 and merge leaf nodes
level = i - 1 # Since i starts at 8, - 1
if leafCount <= k: # If the number of leaf nodes is less than the extracted number k, end
break
if not self.levels[level] is None: # The linked list is not empty. Traverse the parent layer of the leaf node, because the color of the parent node is to be counted here
for node in self.levels[level]: # Traverse the node node in the linked list
leafCount -= node.reduce() # Count the color of node
if leafCount <= k: # If the number of leaf nodes is less than the extracted number k, end
break
self.levels[level] = [] # level null
# Extraction color
colors = []
# Get all leaf nodes of the merged octree
for leafNode in self.root.leafNodes():
if leafNode.isLeaf() and len(colors) <= k:
# Get the average value of Node color
colors.append(leafNode.normalize())
# Returns the extracted color
return colors
def octreeColor(imgPath):
# Read picture
img = cv2.imdecode(np.fromfile(imgPath, dtype=np.uint8), -1)
img = np.array(img)
width, height, channel = img.shape
# Create octree
octree = Octree()
# Add color
for i in range(width):
for j in range(height):
octree.addColor(Color(img[i, j, 0], img[i, j, 1], img[i, j, 2]))
# Extract color
k = 16
colors = octree.extractColor(k)
# Display color block
showColors = np.zeros(shape=(len(colors) * 20, 200, 3), dtype=np.uint8)
for i in range(len(colors)):
c = [colors[i].r, colors[i].g, colors[i].b]
showColors[i*20: i*20+20, :, :] = np.array(c)
cv2.imshow("", showColors)
cv2.waitKey(0)
performance
After testing: about 20 ~ 30 seconds on your PC platform.
K-clustering
TODO
Color modeling
TODO