catalogue
Problem background
Stepper motor is an open-loop control element that converts electric pulse signal into angular displacement or linear displacement. It is only because of the function of driver that it is step-by-step evolved and digitized. Without overload, the speed and stop position of stepping motor only depend on the frequency and number of pulses of pulse signal, and are not limited by load. The starting and operation of stepping motor directly affects the stability and accuracy of digital control. Therefore, in the process of stepping motor control, it is necessary to effectively transition the acceleration operation stage to ensure the accurate and efficient operation of the motor. At present, the stepping motor drive technology mainly adopts chopper constant current control and sinusoidal pulse width modulation technology for motor control, which greatly improves the running speed and accuracy of the motor.
Based on many advantages of stepping motor, it has been widely used in many fields, such as industrial automation equipment, office automation equipment and so on, such as horizontal and vertical tool walking of NC machine tool, radial feed of inner circle slicer, printing of office supplies and so on. With the continuous development of science and technology, higher requirements are put forward for the control technology of stepping motor. Therefore, it has become an indisputable fact for the development of science and technology to explore a more comprehensive and more accurate stepping motor control method.
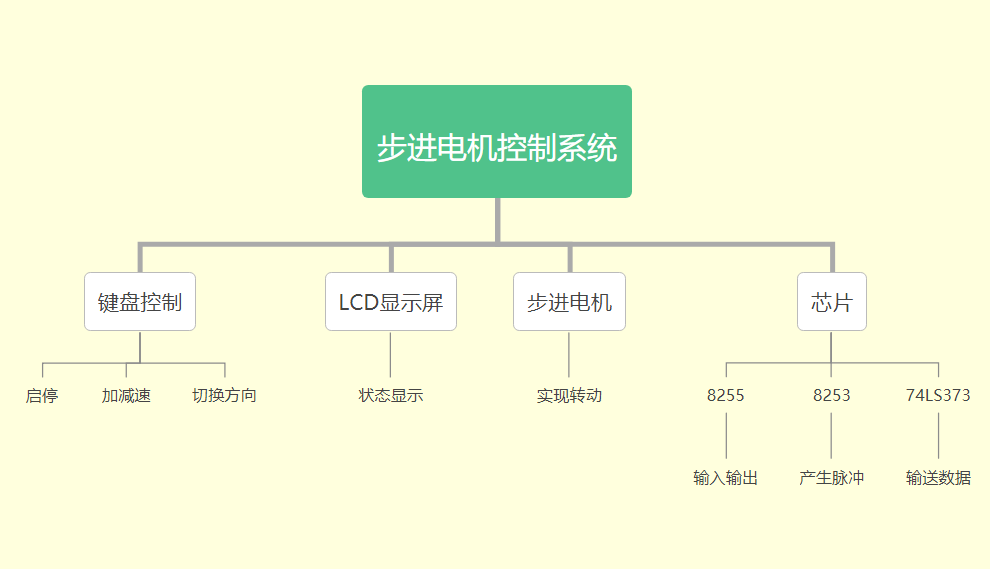
Functional module diagram
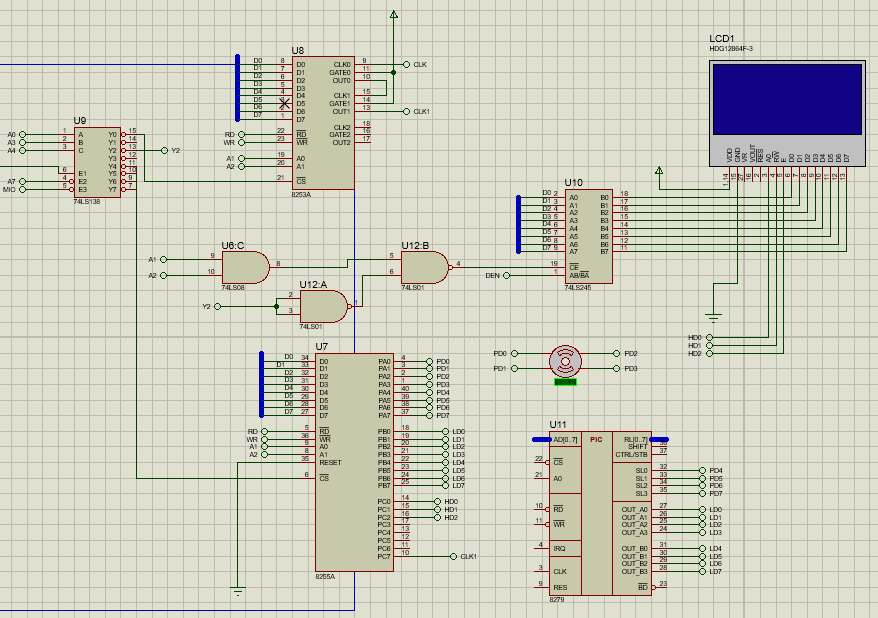
The circuit principle diagram
System function description
The stepping motor control system takes the 4 * 4 keyboard as the input port. After reading the command from the keyboard, it outputs it through port 8255A to make the stepping motor rotate. The rotation frequency of the motor is provided by the output pulse of 8253. After the motor rotates, the 74LS273 outputs to the LCD to make the LCD display the working state of the stepping motor. Press keys 1-9 to switch between different gears, press keys a and B to switch the rotation direction of the motor, press key C to stop the motor, and press key D to clear the LCD screen.
System algorithm design
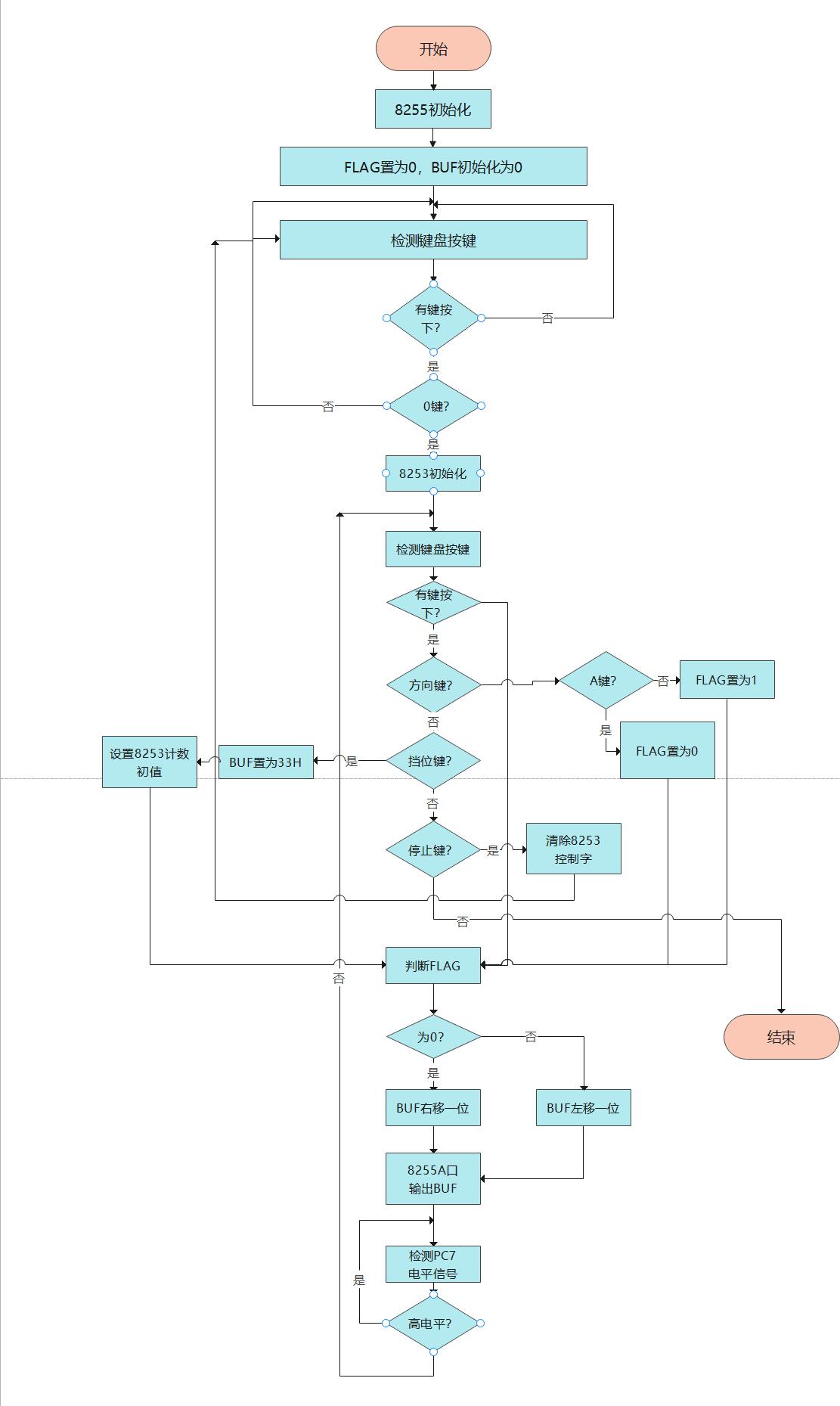
This experiment aims to realize more accurate control of stepping motor with keyboard. Firstly, start the system to initialize 8255, set the FLAG flag FLAG to select the rotation direction (start to set the FLAG to 0, and rotate counterclockwise by default), and then test whether there is a key pressed. When the 0 key is pressed, initialize 8253, input the control word, select channel 0 and channel 1, cascade the two channels, select mode 3, and then set the initial count value for the two channels. When the 1-9 key is pressed, set the BUF to 33H so that the stepper motor can rotate, and then reset the initial count values of the two channels. Keys 1-9 correspond to different initial counting values, so that 8253 can generate pulses of different frequencies. Then, the 8255A port outputs BUF to start the stepping motor. The 74LS273 outputs data to the LCD every step of rotation to make the LCD display the current working state of the stepping motor. Then test whether the key is pressed. If the gear key is pressed, the shift can be realized by resetting the initial count value to 8253. After pressing the direction key, the rotation direction can be switched. When the C key is pressed, the 8253 control word is cleared and the motor stops. When the D key is pressed, the LCD clears.
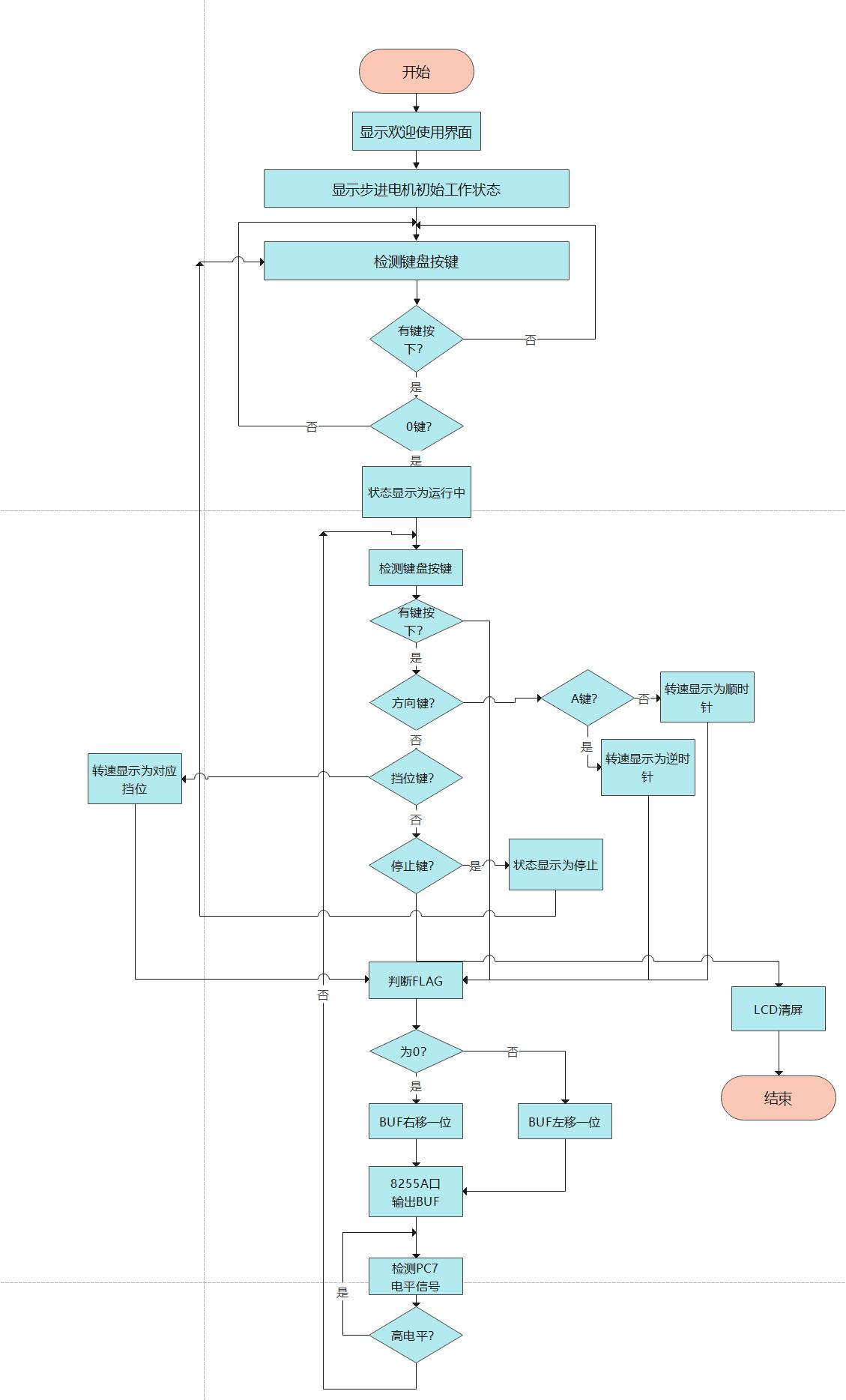
Program flow chart
Stepper motor module
lcm
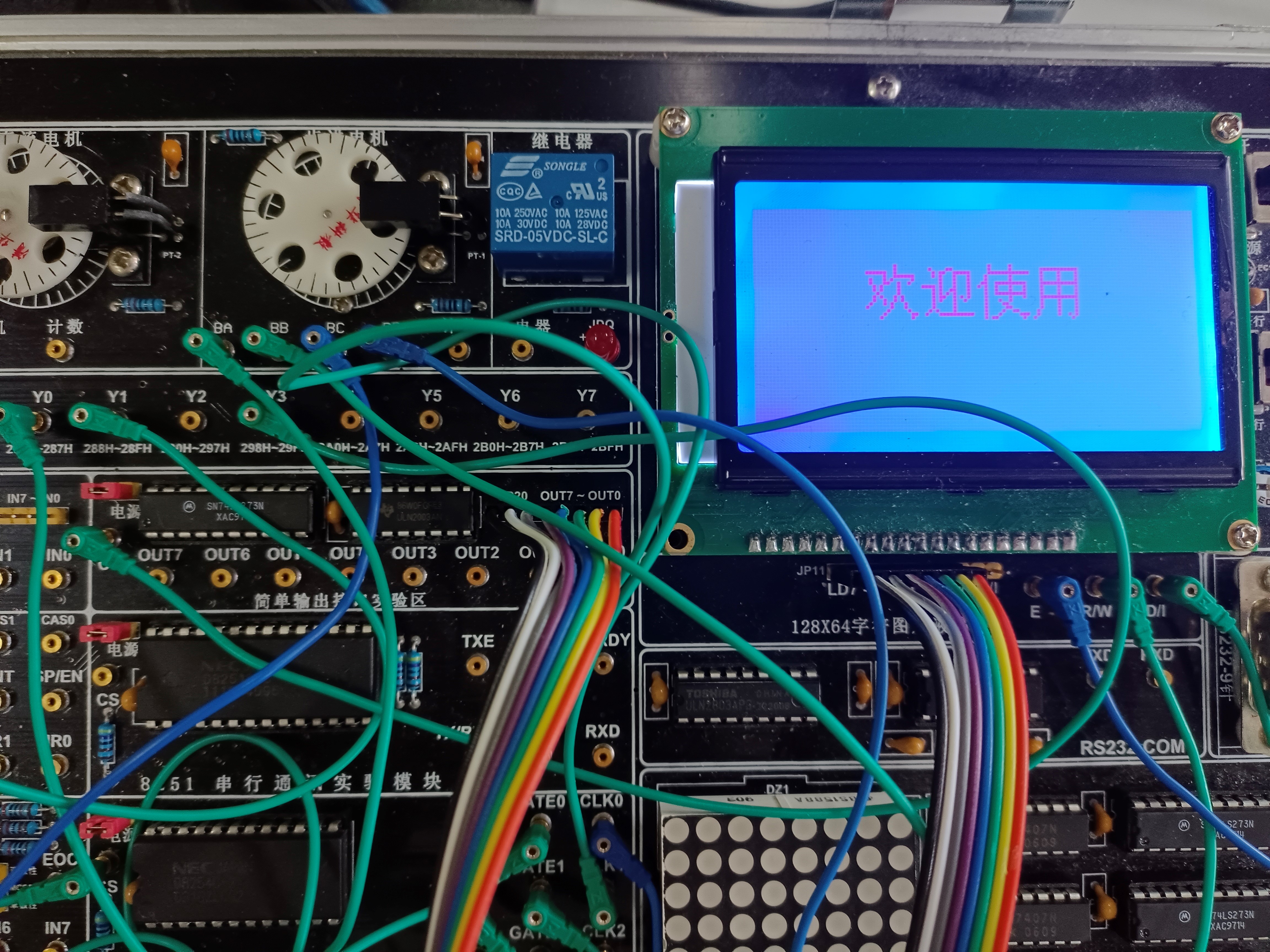
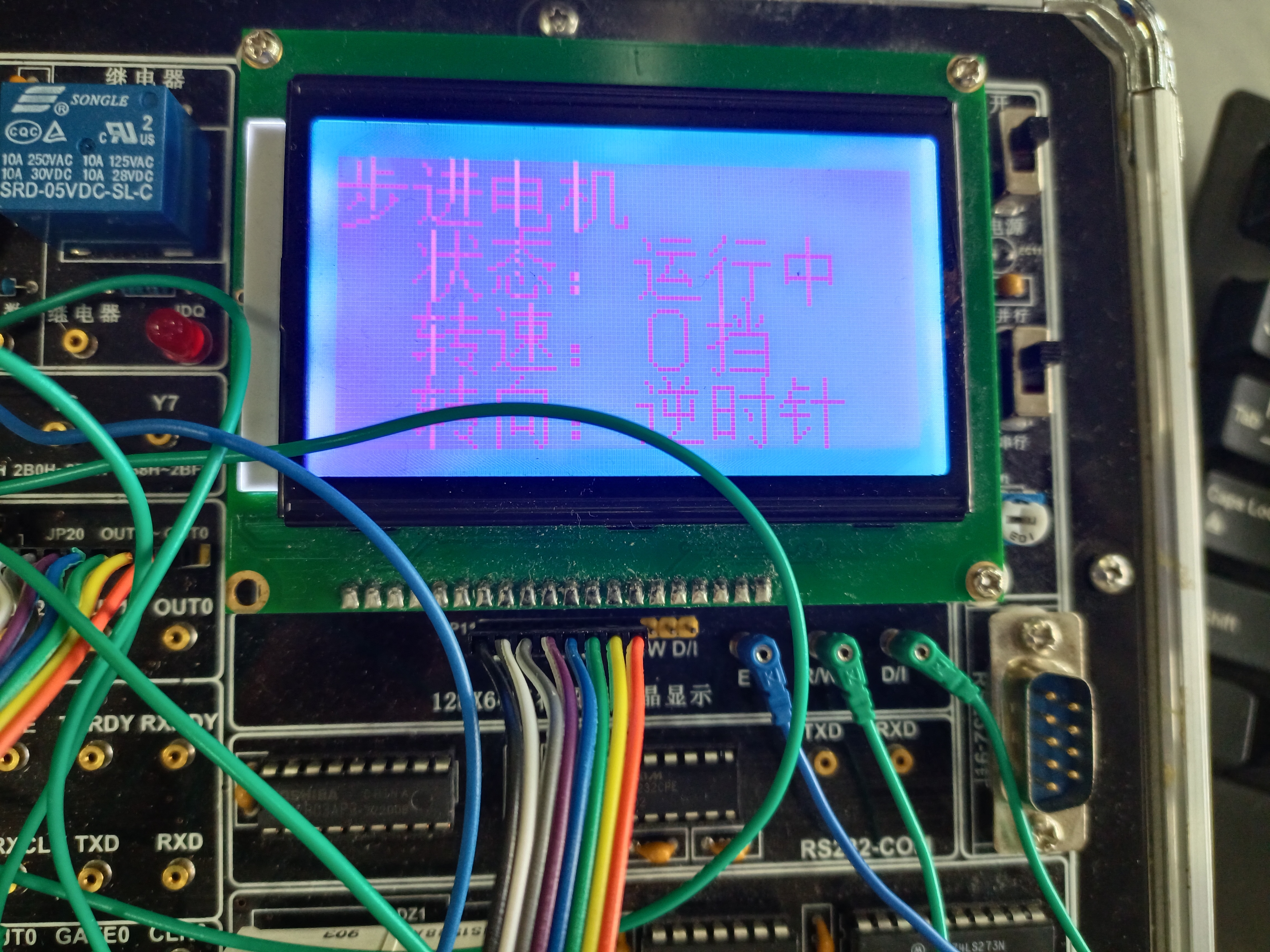
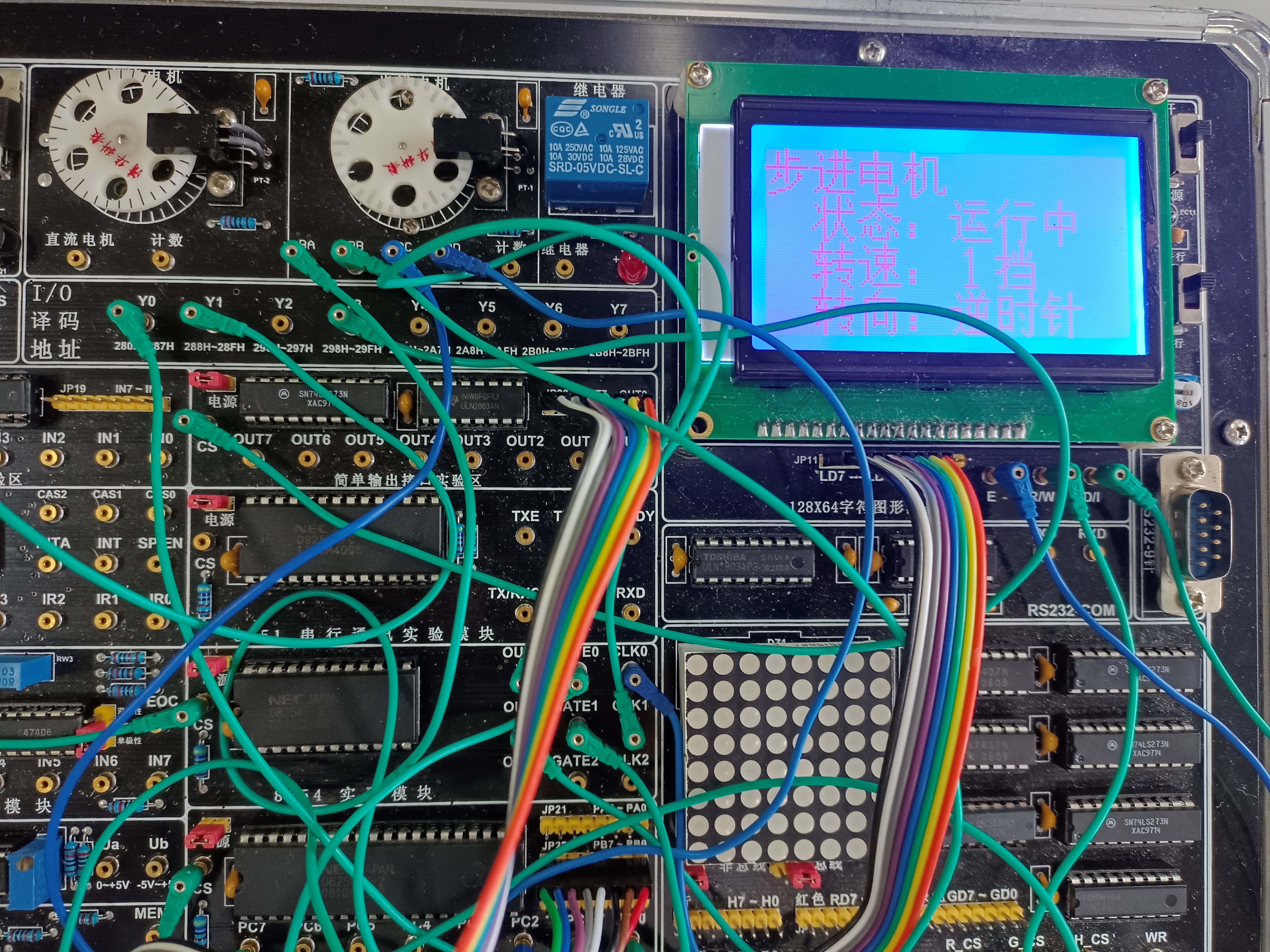
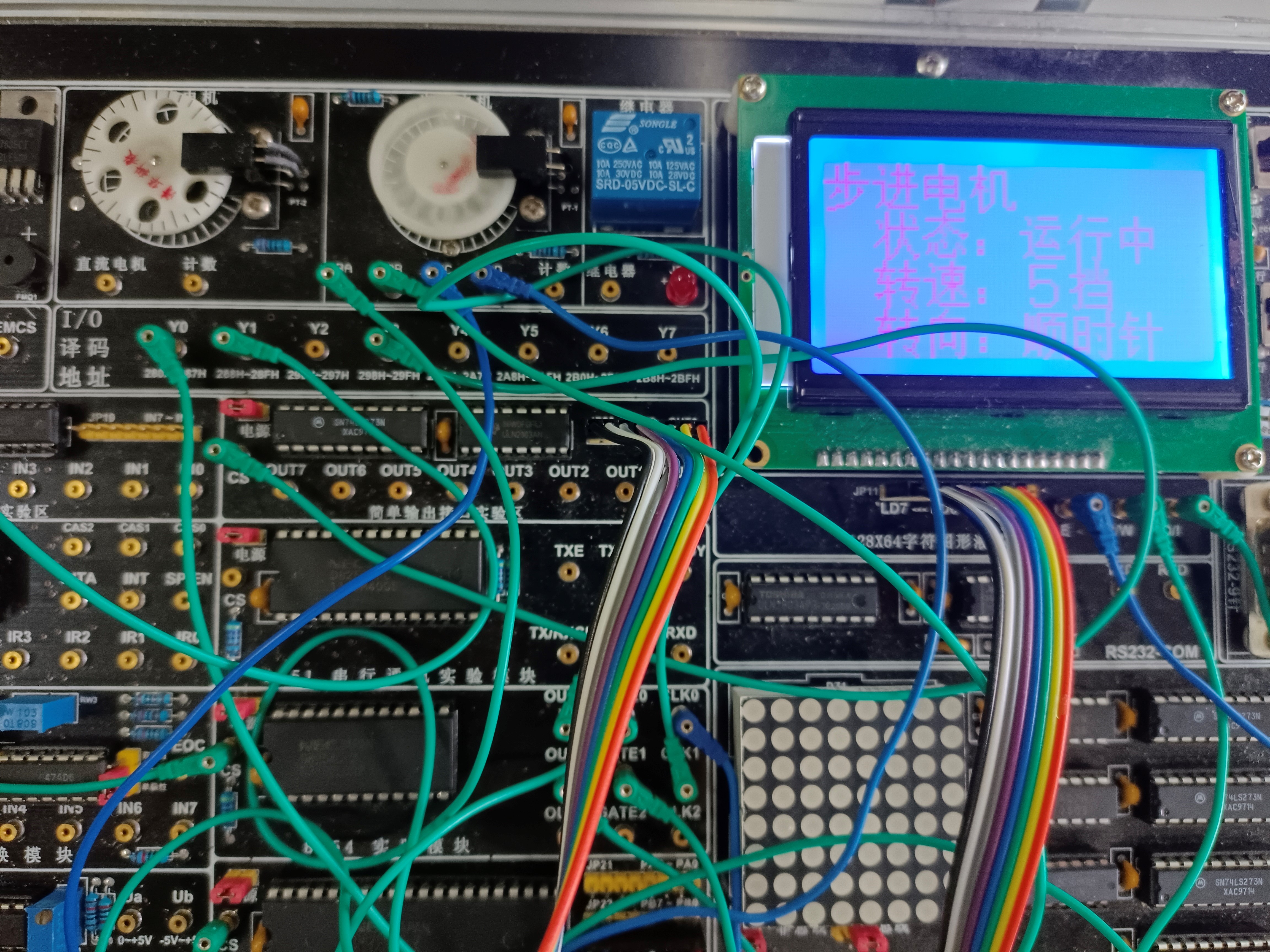
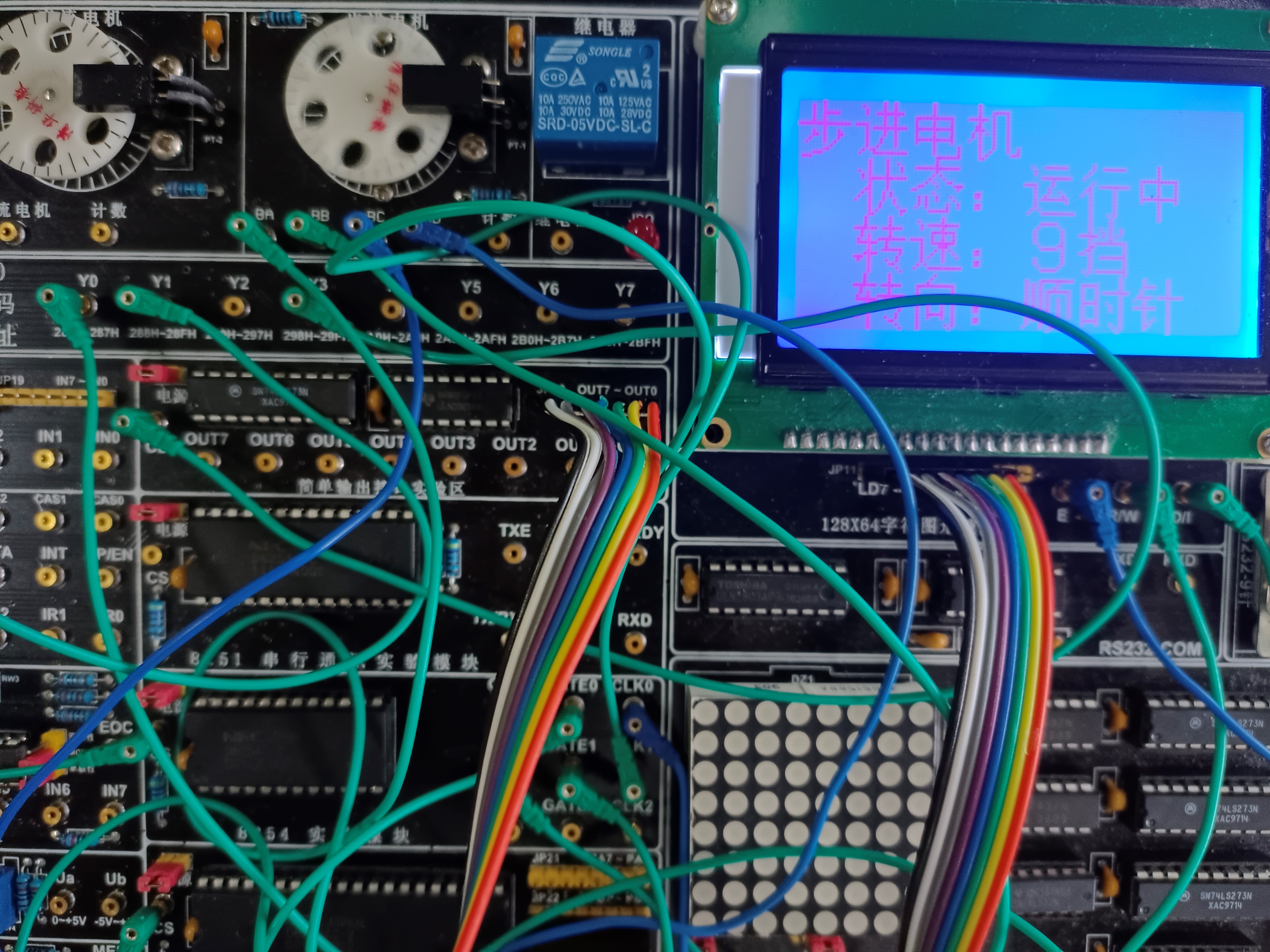
Running screenshot
functional testing
| modular | Test input | Expected results | Measured results |
|
The keyboard controls the rotation of the stepping motor | Press the 0 key | Stepper motor start | Consistent with expected results |
| Press the 1 key | The stepper motor rotates slowly | Consistent with expected results | |
| Press the 3 key | The stepper motor rotates at a slower speed | Consistent with expected results | |
| Press the 5 key | Stepper motor rotates at medium speed | Consistent with expected results | |
| Press the 7 key | The stepper motor rotates at a higher speed | Consistent with expected results | |
| Press the 9 key | High speed rotation of stepping motor | Consistent with expected results | |
| Press the A key | The stepping motor rotates counterclockwise | Consistent with expected results | |
| Press the B key | The stepper motor rotates clockwise | Consistent with expected results | |
| Press the C key | The stepping motor stops rotating | Consistent with expected results | |
| LCD displays the working state of stepping motor | Press the 0 key | The LCD shows that the motor status is running | Consistent with expected results |
| Press the 1 key | LCD shows that the motor speed is 1st gear | Consistent with expected results | |
| Press the 2 key | LCD shows that the motor speed is 2nd gear | Consistent with expected results | |
| Press the 3 key | The LCD shows that the motor speed is gear 3 | Consistent with expected results | |
| Press the 4 key | LCD shows that the motor speed is 4th gear | Consistent with expected results | |
| Press the 5 key | LCD shows that the motor speed is 5th gear | Consistent with expected results | |
| Press the 6 key | LCD shows that the motor speed is 6 gears | Consistent with expected results | |
| Press the 7 key | LCD shows that the motor speed is 7 gears | Consistent with expected results | |
| Press the 8 key | LCD shows that the motor speed is 8 gears | Consistent with expected results | |
| Press the 9 key | LCD shows that the motor speed is 9 gears | Consistent with expected results | |
| Press the A key | The LCD shows that the motor turns counterclockwise | Consistent with expected results | |
| Press the B key | The LCD shows that the motor turns clockwise | Consistent with expected results | |
| Press the C key | The LCD shows that the motor status is stopped | Consistent with expected results | |
| Press the D key | LCD clear screen | Consistent with expected results |
Assembly source code
PORT_A EQU 280H
PORT_B EQU 281H
PORT_C EQU 282H
PORT_CTL1 EQU 283H
PORT_L0 EQU 288H
PORT_L1 EQU 289H
PORT_L2 EQU 28AH
PORT_CTL2 EQU 28BH
PORT_273 EQU 298H
DATA SEGMENT
BUF DB 0
FLAG DB 0
; 0 1 2 3 4 5 6 7
TABLE DB 77H,7BH,7DH,7EH,0B7H,0BBH,0BDH,0BEH
; 8 9 A B C D E F
DB 0D7H,0DBH,0DDH,0DEH,0E7H,0EBH,0EDH,0EEH
HZ_ADR DB 00H ;Start port address of storage display line
INIT_WELCOME DW 0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H
DW 0A1A0H,0A1A0H,0BBB6H,0D3ADH,0CAB9H,0D3C3H,0A1A0H,0A1A0H
DW 0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H
DW 0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H
SHOW DW 0B2BDH,0BDF8H,0B5E7H,0BBFAH,0A1A0H,0A1A0H,0A1A0H,0A1A0H
DW 0A1A0H,0D7B4H,0CCACH,0A3BAH,0CDA3H,0D6B9H,0A1A0H,0A1A0H
DW 0A1A0H,0D7AAH,0CBD9H,0A3BAH,0A3B0H,0B5B2H,0A1A0H,0A1A0H
DW 0A1A0H,0D7AAH,0CFF2H,0A3BAH,0C4E6H,0CAB1H,0D5EBH,0A1A0H
CLEAR1 DW 0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H
DW 0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H
DW 0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H
DW 0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H,0A1A0H
DATA ENDS
STACKS SEGMENT
DB 2560 DUP(?)
STACKS ENDS
CODE SEGMENT
ASSUME CS:CODE,DS:DATA,SS:STACKS,ES:DATA
;-------------------LCD12864 Control command macro OK------------------------
CMD_SETUP MACRO ; LCD Command settings
MOV DX,PORT_C ; Point to 8255 control port C
NOP
MOV AL,00000000B ; PC1 Set 0,pc0 Set 0( LCD W end=0,I end=0)
OUT DX, AL
NOP
MOV AL,00000100B ; PC2 Set 1( LCD E end=1)
OUT DX, AL
NOP
MOV AL,00000000B ; PC2 Set 0,(LCD E end=0)
OUT DX, AL
NOP
ENDM
;-------------------LCD12864 Write data macro OK------------------------
DATA_SETUP MACRO ; LCD Write data
MOV DX,PORT_C ; Point to 8255 control port C
MOV AL,00000001B ; PC1 Set to 0, PC0=1 (LCD I end=1)
OUT DX,AL
NOP
MOV AL,00000101B ; PC2 Set 1( LCD E end=1)
OUT DX,AL
NOP
MOV AL,00000001B ; PC2 Set 0,(LCD E end=0)
OUT DX,AL
NOP
ENDM
;-------------------LCD12864 Display character OK------------------------
STRING_SHOW MACRO INT_N
LOCAL CONTINUE1
;Several Chinese characters are displayed in one line, INT_N As parameter
MOV CL,INT_N
CONTINUE1:
PUSH CX
MOV AL,HZ_ADR
MOV DX, PORT_273 ;for the first time, pa0=0
OUT DX, AL
CMD_SETUP ; set up DDRAM Address command
MOV AX,[BX]
PUSH AX
MOV AL,AH ; Send Chinese character code first
MOV DX,PORT_273
OUT DX,AL
DATA_SETUP ; Output Chinese character encoding high byte
POP AX
MOV DX,PORT_273
OUT DX, AL
DATA_SETUP ; Output Chinese character encoding low byte
INC BX
INC BX ; Modify the pointer to the display inner code buffer
INC BYTE PTR HZ_ADR ; modify LCD Display port address HZ_ADR Is a byte unit
POP CX
DEC CL
JNZ CONTINUE1
ENDM
START:
MOV AX,DATA
MOV DS,AX
MOV DX,PORT_CTL1
MOV AL,8AH
OUT DX,AL
MOV AL,00H
MOV FLAG,AL
CALL BEGIN
CALL DELAY3
CALL DELAY3
CALL DELAY3
CALL DELAY3
CALL DELAY3
CALL DELAY3
CALL DELAY3
CALL DELAY3
CALL DELAY3
CALL DELAY3
CALL DELAY3
CALL NEXT
MOV DX,PORT_CTL2
MOV AL,37H
OUT DX,AL
MOV AL,77H
OUT DX,AL
MOV DX,PORT_L0
MOV AL,20H
OUT DX,AL
MOV AL,00H
OUT DX,AL
MOV DX,PORT_L1
MOV AL,20H
OUT DX,AL
MOV AL,00H
OUT DX,AL
KEY:
MOV DX,PORT_A
MOV AL,00H
OUT DX,AL
MOV DX,PORT_B
WAIT_OPEN:
IN AL,DX
AND AL,0FH
CMP AL,0FH
JNE WAIT_OPEN
WAIT_PRES:
IN AL,DX
AND AL,0FH
CMP AL,0FH
JE STE1
MOV CX,00EAH
DELAY:LOOP DELAY
IN AL,DX
AND AL,0FH
CMP AL,0FH
JE STE1
MOV AL,0FEH
MOV CL,AL
NEXT_ROW:
MOV DX,PORT_A
OUT DX,AL
MOV DX,PORT_B
IN AL,DX
AND AL,0FH
CMP AL,0FH
JNE ENCODE
ROL CL,01
MOV AL,CL
JMP NEXT_ROW
ENCODE:
MOV BX,000FH
IN AL,DX
NEXT_TRY:
CMP AL,TABLE[BX]
JE DONE
DEC BX
JNS NEXT_TRY
MOV AH,01
JMP EXIT
DONE:
MOV AL,BL
MOV AH,00
JMP KEY_TEST
EXIT:HLT
STE1:
JMP FLAG_TEST
KEY_TEST:
CMP AL,00H
JZ ST0
CMP AL,01H
JZ ST1
CMP AL,02H
JZ ST2
CMP AL,03H
JZ ST3
CMP AL,04H
JZ ST4
CMP AL,05H
JZ ST5
CMP AL,06H
JZ ST6
CMP AL,07H
JZ ST7
CMP AL,08H
JZ ST8
CMP AL,09H
JZ ST9
CMP AL,0AH
JZ STA
CMP AL,0BH
JZ STB
CMP AL,0CH
JZ STC1
CMP AL,0DH
JZ STD1
ST3:
JMP KEY_3
ST4:
JMP KEY_4
ST7:
JMP KEY_7
ST8:
JMP KEY_8
ST9:
JMP KEY_9
STA:
JMP KEY_A
STB:
JMP KEY_B
STC1:
JMP KEY_C
ST5:
JMP KEY_5
ST6:
JMP KEY_6
ST2:
JMP KEY_2
STD1:
JMP KEY_D
ST0:
JMP KEY_0
ST1:
JMP KEY_1
FLAG_TEST:
MOV AL,FLAG
TEST AL,01H
JNZ FLAG_1
JMP FLAG_0
FLAG_0:
MOV AL,BUF
ROR AL,1
MOV BUF,AL
MOV AL,9CH
MOV DX, PORT_273
OUT DX, AL
CMD_SETUP
CALL DELAY4
MOV AX,0C4E6H
PUSH AX
MOV AL,AH
MOV DX,PORT_273
OUT DX,AL
DATA_SETUP
CALL DELAY4
POP AX
MOV DX,PORT_273
OUT DX, AL
DATA_SETUP
CALL DELAY4
JMP OUT1
FLAG_1:
MOV AL,BUF
ROL AL,1
MOV BUF,AL
MOV AL,9CH
MOV DX, PORT_273
OUT DX, AL
CMD_SETUP
CALL DELAY4
MOV AX,0CBB3H
PUSH AX
MOV AL,AH
MOV DX,PORT_273
OUT DX,AL
DATA_SETUP
CALL DELAY4
POP AX
MOV DX,PORT_273
OUT DX, AL
DATA_SETUP
CALL DELAY4
JMP OUT1
OUT1:
MOV AL,BUF
MOV DX,PORT_A
OUT DX,AL
MOV DX,PORT_C
TEMP:
IN AL,DX
TEST AL,80H
JZ TEMP
JMP KEY
KEY_0:
MOV AL,94H
MOV DX, PORT_273
OUT DX, AL
CMD_SETUP
CALL DELAY4
MOV AX,0D4CBH
PUSH AX
MOV AL,AH
MOV DX,PORT_273
OUT DX,AL
DATA_SETUP
CALL DELAY4
POP AX
MOV DX,PORT_273
OUT DX, AL
DATA_SETUP
CALL DELAY4
MOV AL,95H
MOV DX, PORT_273
OUT DX, AL
CMD_SETUP
CALL DELAY4
MOV AX,0D0D0H
PUSH AX
MOV AL,AH
MOV DX,PORT_273
OUT DX,AL
DATA_SETUP
CALL DELAY4
POP AX
MOV DX,PORT_273
OUT DX, AL
DATA_SETUP
CALL DELAY4
MOV AL,96H
MOV DX, PORT_273
OUT DX, AL
CMD_SETUP
CALL DELAY4
MOV AX,0D6D0H
PUSH AX
MOV AL,AH
MOV DX,PORT_273
OUT DX,AL
DATA_SETUP
CALL DELAY4
POP AX
MOV DX,PORT_273
OUT DX, AL
DATA_SETUP
CALL DELAY4
JMP FLAG_TEST
KEY_1:
MOV AL,33H
MOV BUF,AL
MOV DX,PORT_L0
MOV AL,80H
OUT DX,AL
MOV AL,00H
OUT DX,AL
MOV DX,PORT_L1
MOV AL,00H
OUT DX,AL
MOV AL,10H
OUT DX,AL
MOV AL,8CH
MOV DX, PORT_273
OUT DX, AL
CMD_SETUP
CALL DELAY4
MOV AX,0A3B1H
PUSH AX
MOV AL,AH
MOV DX,PORT_273
OUT DX,AL
DATA_SETUP
CALL DELAY4
POP AX
MOV DX,PORT_273
OUT DX, AL
DATA_SETUP
CALL DELAY4
JMP FLAG_TEST
KEY_2:
MOV AL,33H
MOV BUF,AL
MOV DX,PORT_L0
MOV AL,60H
OUT DX,AL
MOV AL,00H
OUT DX,AL
MOV DX,PORT_L1
MOV AL,00H
OUT DX,AL
MOV AL,10H
OUT DX,AL
MOV AL,8CH
MOV DX, PORT_273
OUT DX, AL
CMD_SETUP
CALL DELAY4
MOV AX,0A3B2H
PUSH AX
MOV AL,AH
MOV DX,PORT_273
OUT DX,AL
DATA_SETUP
CALL DELAY4
POP AX
MOV DX,PORT_273
OUT DX, AL
DATA_SETUP
CALL DELAY4
JMP FLAG_TEST
KEY_3:
MOV AL,33H
MOV BUF,AL
MOV DX,PORT_L0
MOV AL,40H
OUT DX,AL
MOV AL,00H
OUT DX,AL
MOV DX,PORT_L1
MOV AL,00H
OUT DX,AL
MOV AL,10H
OUT DX,AL
MOV AL,8CH
MOV DX, PORT_273
OUT DX, AL
CMD_SETUP
CALL DELAY4
MOV AX,0A3B3H
PUSH AX
MOV AL,AH
MOV DX,PORT_273
OUT DX,AL
DATA_SETUP
CALL DELAY4
POP AX
MOV DX,PORT_273
OUT DX, AL
DATA_SETUP
CALL DELAY4
JMP FLAG_TEST
KEY_4:
MOV AL,33H
MOV BUF,AL
MOV DX,PORT_L0
MOV AL,20H
OUT DX,AL
MOV AL,00H
OUT DX,AL
MOV DX,PORT_L1
MOV AL,00H
OUT DX,AL
MOV AL,10H
OUT DX,AL
MOV AL,8CH
MOV DX, PORT_273
OUT DX, AL
CMD_SETUP
CALL DELAY4
MOV AX,0A3B4H
PUSH AX
MOV AL,AH
MOV DX,PORT_273
OUT DX,AL
DATA_SETUP
CALL DELAY4
POP AX
MOV DX,PORT_273
OUT DX, AL
DATA_SETUP
CALL DELAY4
JMP FLAG_TEST
KEY_5:
MOV AL,33H
MOV BUF,AL
MOV DX,PORT_L0
MOV AL,10H
OUT DX,AL
MOV AL,00H
OUT DX,AL
MOV DX,PORT_L1
MOV AL,00H
OUT DX,AL
MOV AL,10H
OUT DX,AL
MOV AL,8CH
MOV DX, PORT_273
OUT DX, AL
CMD_SETUP
CALL DELAY4
MOV AX,0A3B5H
PUSH AX
MOV AL,AH
MOV DX,PORT_273
OUT DX,AL
DATA_SETUP
CALL DELAY4
POP AX
MOV DX,PORT_273
OUT DX, AL
DATA_SETUP
CALL DELAY4
JMP FLAG_TEST
KEY_6:
MOV AL,33H
MOV BUF,AL
MOV DX,PORT_L0
MOV AL,08H
OUT DX,AL
MOV AL,00H
OUT DX,AL
MOV DX,PORT_L1
MOV AL,00H
OUT DX,AL
MOV AL,10H
OUT DX,AL
MOV AL,8CH
MOV DX, PORT_273
OUT DX, AL
CMD_SETUP
CALL DELAY4
MOV AX,0A3B6H
PUSH AX
MOV AL,AH
MOV DX,PORT_273
OUT DX,AL
DATA_SETUP
CALL DELAY4
POP AX
MOV DX,PORT_273
OUT DX, AL
DATA_SETUP
CALL DELAY4
JMP FLAG_TEST
KEY_7:
MOV AL,33H
MOV BUF,AL
MOV DX,PORT_L0
MOV AL,06H
OUT DX,AL
MOV AL,00H
OUT DX,AL
MOV DX,PORT_L1
MOV AL,00H
OUT DX,AL
MOV AL,10H
OUT DX,AL
MOV AL,8CH
MOV DX, PORT_273
OUT DX, AL
CMD_SETUP
CALL DELAY4
MOV AX,0A3B7H
PUSH AX
MOV AL,AH
MOV DX,PORT_273
OUT DX,AL
DATA_SETUP
CALL DELAY4
POP AX
MOV DX,PORT_273
OUT DX, AL
DATA_SETUP
CALL DELAY4
JMP FLAG_TEST
KEY_8:
MOV AL,33H
MOV BUF,AL
MOV DX,PORT_L0
MOV AL,05H
OUT DX,AL
MOV AL,00H
OUT DX,AL
MOV DX,PORT_L1
MOV AL,00H
OUT DX,AL
MOV AL,10H
OUT DX,AL
MOV AL,8CH
MOV DX, PORT_273
OUT DX, AL
CMD_SETUP
CALL DELAY4
MOV AX,0A3B8H
PUSH AX
MOV AL,AH
MOV DX,PORT_273
OUT DX,AL
DATA_SETUP
CALL DELAY4
POP AX
MOV DX,PORT_273
OUT DX, AL
DATA_SETUP
CALL DELAY4
JMP FLAG_TEST
KEY_9:
MOV AL,33H
MOV BUF,AL
MOV DX,PORT_L0
MOV AL,04H
OUT DX,AL
MOV AL,00H
OUT DX,AL
MOV DX,PORT_L1
MOV AL,00H
OUT DX,AL
MOV AL,10H
OUT DX,AL
MOV AL,8CH
MOV DX, PORT_273
OUT DX, AL
CMD_SETUP
CALL DELAY4
MOV AX,0A3B9H
PUSH AX
MOV AL,AH
MOV DX,PORT_273
OUT DX,AL
DATA_SETUP
CALL DELAY4
POP AX
MOV DX,PORT_273
OUT DX, AL
DATA_SETUP
CALL DELAY4
JMP FLAG_TEST
KEY_A:
MOV AL,00H
MOV FLAG,AL
JMP FLAG_TEST
KEY_B:
MOV AL,01H
MOV FLAG,AL
JMP FLAG_TEST
KEY_C:
MOV DX,PORT_CTL2
MOV AL,10H
OUT DX,AL
MOV AL,50H
OUT DX,AL
MOV AL,94H
MOV DX, PORT_273
OUT DX, AL
CMD_SETUP
CALL DELAY4
MOV AX,0CDA3H
PUSH AX
MOV AL,AH
MOV DX,PORT_273
OUT DX,AL
DATA_SETUP
CALL DELAY4
POP AX
MOV DX,PORT_273
OUT DX, AL
DATA_SETUP
CALL DELAY4
MOV AL,95H
MOV DX, PORT_273
OUT DX, AL
CMD_SETUP
CALL DELAY4
MOV AX,0D6B9H
PUSH AX
MOV AL,AH
MOV DX,PORT_273
OUT DX,AL
DATA_SETUP
CALL DELAY4
POP AX
MOV DX,PORT_273
OUT DX, AL
DATA_SETUP
CALL DELAY4
MOV AL,96H
MOV DX, PORT_273
OUT DX, AL
CMD_SETUP
CALL DELAY4
MOV AX,0A1A0H
PUSH AX
MOV AL,AH
MOV DX,PORT_273
OUT DX,AL
DATA_SETUP
CALL DELAY4
POP AX
MOV DX,PORT_273
OUT DX, AL
DATA_SETUP
CALL DELAY4
MOV AL,8CH
MOV DX, PORT_273
OUT DX, AL
CMD_SETUP
CALL DELAY4
MOV AX,0A3B0H
PUSH AX
MOV AL,AH
MOV DX,PORT_273
OUT DX,AL
DATA_SETUP
CALL DELAY4
POP AX
MOV DX,PORT_273
OUT DX, AL
DATA_SETUP
CALL DELAY4
JMP FLAG_TEST
KEY_D:
CALL ENDING
JMP STOP
DELAY3 PROC NEAR
MOV AL,BL
MOV BL,0FFH
DELAY1: MOV CX,0FFFFH
DELAY2: LOOP DELAY2
DEC BL
JNZ DELAY1
MOV AL,BL
RET
DELAY3 ENDP
DELAY4 PROC NEAR
MOV AL,BL
MOV BL,01H
DELAY5: MOV CX,000FH
DELAY6: LOOP DELAY6
DEC BL
JNZ DELAY5
MOV AL,BL
RET
DELAY4 ENDP
BEGIN PROC
MOV AX, DATA
MOV DS, AX
;----------------LCD Clear the screen and display the welcome interface--------------------
CALL CLEAR
MOV AL,0CH ; display
MOV DX,PORT_273
OUT DX,AL
CMD_SETUP ; start-up LCD Execute command
CALL LCD_DISP_INIT
; CALL DRAW_QR_CODE
CALL DELAY3
RET
BEGIN ENDP
NEXT PROC
MOV AX, DATA
MOV DS, AX
;----------------LCD Clear the screen and display the welcome interface--------------------
CALL CLEAR
MOV AL,0CH ; display
MOV DX,PORT_273
OUT DX,AL
CMD_SETUP ; start-up LCD Execute command
CALL LCD_SHOW
; CALL DRAW_QR_CODE
CALL DELAY3
RET
NEXT ENDP
;--------------------------LCD Screen clearing function------------------------------
CLEAR PROC
MOV AL,00000001B ; Clear control word
MOV DX,PORT_273
OUT DX,AL
CMD_SETUP ; start-up LCD Execute command
RET
CLEAR ENDP
;--------------------------LCD Initialize welcome function-------------------------
LCD_DISP_INIT PROC
CALL CLEAR
MOV AX,DATA
LEA BX, INIT_WELCOME ; Load welcome interface
MOV BYTE PTR HZ_ADR, 80H ; First line start port address
STRING_SHOW 8
MOV BYTE PTR HZ_ADR, 90H ; Second line start port address
STRING_SHOW 8
MOV BYTE PTR HZ_ADR, 88H ; Line 3 start port address
STRING_SHOW 8
MOV BYTE PTR HZ_ADR, 98H ; Line 4 start port address
STRING_SHOW 8
RET
LCD_DISP_INIT ENDP
LCD_SHOW PROC
CALL CLEAR
MOV AX,DATA
LEA BX, SHOW ; Load display interface
MOV BYTE PTR HZ_ADR, 80H ; First line start port address
STRING_SHOW 8
MOV BYTE PTR HZ_ADR, 90H ; Second line start port address
STRING_SHOW 8
MOV BYTE PTR HZ_ADR, 88H ; Line 3 start port address
STRING_SHOW 8
MOV BYTE PTR HZ_ADR, 98H ; Line 4 start port address
STRING_SHOW 8
RET
LCD_SHOW ENDP
LCD_CLEAR PROC
CALL CLEAR
MOV AX,DATA
LEA BX, CLEAR1 ; Load display interface
MOV BYTE PTR HZ_ADR, 80H ; First line start port address
STRING_SHOW 8
MOV BYTE PTR HZ_ADR, 90H ; Second line start port address
STRING_SHOW 8
MOV BYTE PTR HZ_ADR, 88H ; Line 3 start port address
STRING_SHOW 8
MOV BYTE PTR HZ_ADR, 98H ; Line 4 start port address
STRING_SHOW 8
RET
LCD_CLEAR ENDP
ENDING PROC
MOV AX, DATA
MOV DS, AX
;----------------LCD Clear the screen and display the welcome interface--------------------
CALL CLEAR
MOV AL,0CH ; display
MOV DX,PORT_273
OUT DX,AL
CMD_SETUP ; start-up LCD Execute command
CALL LCD_CLEAR
; CALL DRAW_QR_CODE
CALL DELAY3
RET
ENDING ENDP
STOP:
JMP STOP
CODE ENDS
END START