preface
Digital image processing c++ opencv (VS2019 opencv4.53) is continuously updated
1, Homomorphic filtering principle
1. Treatment principle
(1) It is considered that the image f(x,y) consists of two parts: illumination component i(x,y), reflection component r(x,y):
f
(
x
,
y
)
=
i
(
x
,
y
)
∗
r
(
x
,
y
)
f(x,y)=i(x,y)*r(x,y)
f(x,y)=i(x,y)∗r(x,y)
(2) However, the above formula cannot be directly used to process two components in the frequency domain because the Fourier transform of the product is not equal to the product of the transform. Therefore, the definition is:
z
(
x
,
y
)
=
l
n
f
(
x
,
y
)
=
l
n
i
(
x
,
y
)
+
l
n
r
(
x
,
y
)
z(x,y)=lnf(x,y)=lni(x,y)+lnr(x,y)
z(x,y)=lnf(x,y)=lni(x,y)+lnr(x,y)
(3) Fourier transform can be performed after the above transform, including:
Z
(
u
,
v
)
=
F
i
(
u
,
v
)
+
F
r
(
u
,
v
)
Z(u,v)=F_i(u,v)+F_r(u,v)
Z(u,v)=Fi(u,v)+Fr(u,v)
(4) Then a filter H(u,v) can be set to filter Z(u,v):
S
(
u
,
v
)
=
H
(
u
,
v
)
∗
Z
(
u
,
v
)
=
H
(
u
,
v
)
∗
F
i
(
u
,
v
)
+
H
(
u
,
v
)
∗
F
r
(
u
,
v
)
S(u,v)=H(u,v)*Z(u,v)=H(u,v)*F_i(u,v)+H(u,v)*F_r(u,v)
S(u,v)=H(u,v)∗Z(u,v)=H(u,v)∗Fi(u,v)+H(u,v)∗Fr(u,v)
(5) s(x,y) is obtained by inverse Fourier transform for S(u,v), then the filtered image g(x,y):
g
(
x
,
y
)
=
e
s
(
x
,
y
)
g(x,y)=e^{s(x,y)}
g(x,y)=es(x,y)
In the image, it is considered that the low-frequency component is related to the irradiation component, and the high-frequency component is related to the reflection component. Homomorphic filtering is to set a filter H(x,y) and use different controllable methods to affect the influence of low-frequency components and high-frequency components on the image.
2, Homomorphic filter template and MATLAB code
1. Homomorphic filter
(1) The function of Gaussian high pass filter is as follows:
H
(
u
,
v
)
=
1
−
e
−
D
2
(
u
,
v
)
/
2
D
0
2
H(u,v)=1-e^{-D^2(u,v)/2D_0^2}
H(u,v)=1−e−D2(u,v)/2D02
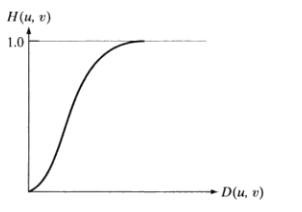
The profile of Gaussian high pass filter is as above, so that the low-frequency component is 0 and the high-frequency component remains unchanged
(2) Homomorphic filter modified with Gaussian high pass filter as template
H ( u , v ) = ( γ H − γ L ) [ 1 − e − C [ D 2 ( u , v ) / 2 D 0 2 ] ] + γ L H(u,v)=(γ_H-γ_L)[1-e^{-C[D^2(u,v)/2D_0^2]}]+γ_L H(u,v)=(γH−γL)[1−e−C[D2(u,v)/2D02]]+γL
his in γ H and γ L gauge set frequency rate of Model around , c control system in between of partial oblique degree among γ_ H and γ_ L specifies the range of frequency, c controls the deviation in the middle among γ H , and γ L ﹤ specify the frequency range, c control the deviation in the middle
When γ H > 1 γ_H>1 γH>1, γ L < 1 γ_L<1 γ When L < 1, the corresponding section is:
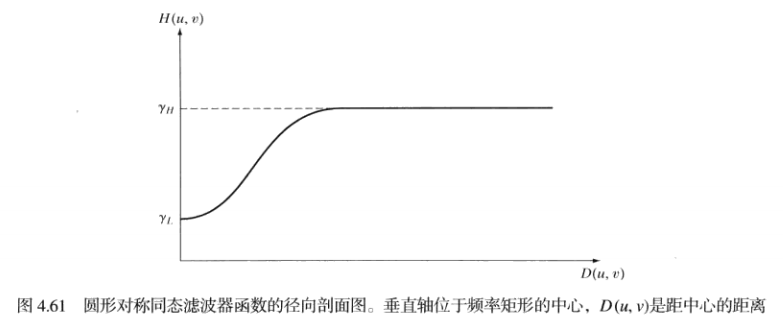
It can be seen that this filter reduces the influence of low-frequency components and increases the influence of high-frequency components.
(3) Homomorphic filtering steps:

2. Code
The code is as follows:
#include<iostream>
#include<opencv2/opencv.hpp>
#include "MY_DFT.h"
using namespace cv;
using namespace std;
int main()
{
Mat image, image_gray, image_output, image_transform; //Define input image, gray image and output image
image = imread("lena.png"); //Read the image;
if (image.empty())
{
cout << "Read error" << endl;
return -1;
}
imshow("image", image);
cvtColor(image, image_gray, COLOR_BGR2GRAY); //Convert to grayscale
imshow("image_gray", image_gray); //Display grayscale image
//1. Perform ln transformation
Mat image_gray2(image_gray.size(), CV_32F);
for (int i = 0; i < image_gray.rows; i++)
{
for (int j = 0; j < image_gray.cols; j++)
{
image_gray2.at<float>(i, j) = log(image_gray.at<uchar>(i, j) + 0.1);
}
}
//2. Fourier transform, image_output is the displayable spectrum diagram, image_transform is the complex result of Fourier transform
My_DFT(image_gray2, image_output, image_transform);
imshow("image_output", image_output);
//3. Gaussian high pass filter
Mat planes[] = { Mat_<float>(image_output), Mat::zeros(image_output.size(),CV_32F) };
split(image_transform, planes);//Separate channels to obtain real and imaginary parts
Mat image_transform_real = planes[0];
Mat image_transform_imag = planes[1];
int core_x = image_transform_real.rows / 2;//Spectrum center coordinates
int core_y = image_transform_real.cols / 2;
int d0 = 10; //Filter radius
float h;
//Parameters:
float rh = 3;
float rl = 0.5;
float c = 5;
for (int i = 0; i < image_transform_real.rows; i++)
{
for (int j = 0; j < image_transform_real.cols; j++)
{
h = (rh-rl) * (1 - exp(-c * ((i - core_x) * (i - core_x) + (j - core_y) * (j - core_y)) / (d0 * d0))) + rl;
image_transform_real.at<float>(i, j) = image_transform_real.at<float>(i, j) * h;
image_transform_imag.at<float>(i, j) = image_transform_imag.at<float>(i, j) * h;
}
}
planes[0] = image_transform_real;
planes[1] = image_transform_imag;
Mat image_transform_ilpf;//Define Gaussian high pass filtering results
merge(planes, 2, image_transform_ilpf);
//4. Inverse Fourier transform
Mat iDft[] = { Mat_<float>(image_output), Mat::zeros(image_output.size(),CV_32F) };
idft(image_transform_ilpf, image_transform_ilpf);//inverse Fourier transform
split(image_transform_ilpf, iDft);//Separate channel, mainly obtain channel 0
magnitude(iDft[0], iDft[1], iDft[0]); //Calculate the amplitude of complex number and save it in iDft[0]
normalize(iDft[0], iDft[0], 0, 1, NORM_MINMAX);//Normalization processing
exp(iDft[0], iDft[0]);
normalize(iDft[0], iDft[0], 0, 1, NORM_MINMAX);//Normalization processing
iDft[0].convertTo(iDft[0], CV_8U, 255 / 1.0, 0);
imshow("idft", iDft[0]);//Display inverse transform image
waitKey(0); //Pause, hold the image display, and wait for the key to end
return 0;
}
Fourier transform code (. h file):
#pragma once #include<iostream> #include<opencv2/opencv.hpp> #include<cmath> using namespace cv; using namespace std; void My_DFT(Mat input_image, Mat& output_image, Mat& transform_array);
Fourier transform code (. cpp file):
#include "MY_DFT.h"
//The spectrum and complex domain results are obtained by Fourier transform
void My_DFT(Mat input_image, Mat& output_image, Mat& transform_image)
{
//1. The operation speed is fast when the extended image matrix is a multiple of 2, 3 and 5
int m = getOptimalDFTSize(input_image.rows);
int n = getOptimalDFTSize(input_image.cols);
copyMakeBorder(input_image, input_image, 0, m - input_image.rows, 0, n - input_image.cols, BORDER_CONSTANT, Scalar::all(0));
//2. Create a two channel matrix planes to store the real and imaginary parts of the complex number
Mat planes[] = { Mat_<float>(input_image), Mat::zeros(input_image.size(), CV_32F) };
//3. Create a multi-channel array from multiple single channel arrays: transform_image. The function Merge combines several arrays into a multi-channel array, that is, each element of the output array will be a cascade of the input array elements
merge(planes, 2, transform_image);
//4. Fourier transform
dft(transform_image, transform_image);
//5. Calculate the amplitude of complex number and save it in output_image (spectrum diagram)
split(transform_image, planes); // The dual channel is divided into two single channels, one represents the real part and the other represents the imaginary part
Mat transform_image_real = planes[0];
Mat transform_image_imag = planes[1];
magnitude(planes[0], planes[1], output_image); //Calculate the amplitude of the complex number and save it in output_image (spectrum diagram)
//6. The previous spectrum is too large to display, so it is difficult to convert
output_image += Scalar(1); // Before taking logarithm, add 1 to all pixels to prevent log0
log(output_image, output_image); // Take logarithm
normalize(output_image, output_image, 0, 1, NORM_MINMAX); //normalization
//7. Clipping and redistribution amplitude image limit
output_image = output_image(Rect(0, 0, output_image.cols & -2, output_image.rows & -2));
// Rearrange the quadrants in the Fourier image so that the origin is in the center of the image
int cx = output_image.cols / 2;
int cy = output_image.rows / 2;
Mat q0(output_image, Rect(0, 0, cx, cy)); // Upper left area
Mat q1(output_image, Rect(cx, 0, cx, cy)); // Upper right area
Mat q2(output_image, Rect(0, cy, cx, cy)); // Lower left area
Mat q3(output_image, Rect(cx, cy, cx, cy)); // Lower right area
//Switching quadrant centralization
Mat tmp;
q0.copyTo(tmp); q3.copyTo(q0); tmp.copyTo(q3);//Swap top left and bottom right
q1.copyTo(tmp); q2.copyTo(q1); tmp.copyTo(q2);//Exchange top right and bottom left
Mat q00(transform_image_real, Rect(0, 0, cx, cy)); // Upper left area
Mat q01(transform_image_real, Rect(cx, 0, cx, cy)); // Upper right area
Mat q02(transform_image_real, Rect(0, cy, cx, cy)); // Lower left area
Mat q03(transform_image_real, Rect(cx, cy, cx, cy)); // Lower right area
q00.copyTo(tmp); q03.copyTo(q00); tmp.copyTo(q03);//Swap top left and bottom right
q01.copyTo(tmp); q02.copyTo(q01); tmp.copyTo(q02);//Exchange top right and bottom left
Mat q10(transform_image_imag, Rect(0, 0, cx, cy)); // Upper left area
Mat q11(transform_image_imag, Rect(cx, 0, cx, cy)); // Upper right area
Mat q12(transform_image_imag, Rect(0, cy, cx, cy)); // Lower left area
Mat q13(transform_image_imag, Rect(cx, cy, cx, cy)); // Lower right area
q10.copyTo(tmp); q13.copyTo(q10); tmp.copyTo(q13);//Swap top left and bottom right
q11.copyTo(tmp); q12.copyTo(q11); tmp.copyTo(q12);//Exchange top right and bottom left
planes[0] = transform_image_real;
planes[1] = transform_image_imag;
merge(planes, 2, transform_image);//Centralize Fourier transform results
}
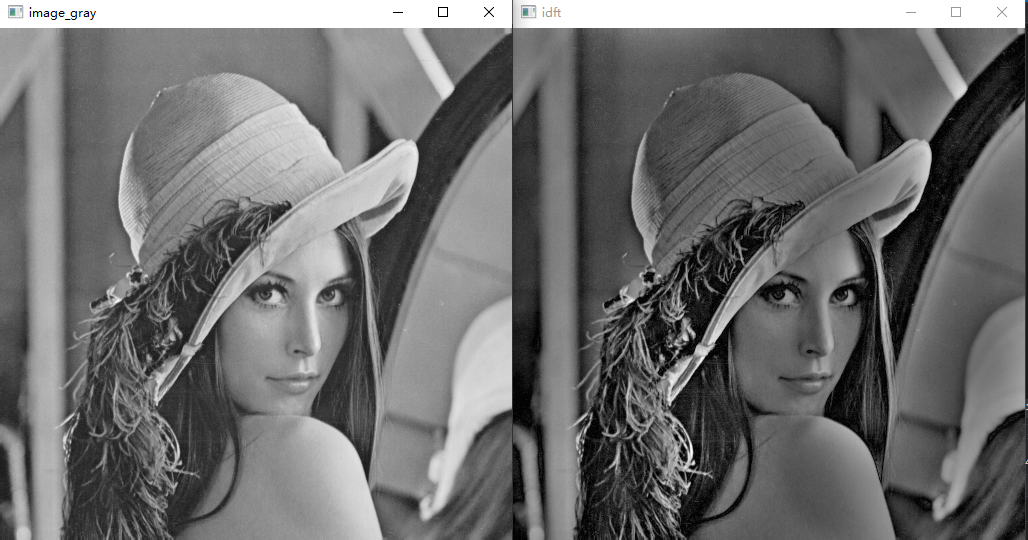
result: