catalogue
4. Two ways of I2C - hardware I2C and software I2C
2, Data collection using AHT20
1, I2C protocol
1. What is the I2C protocol
I2C communication protocol (Inter Integrated Circuit) is developed by Phiilps company. Due to its few pins, simple hardware implementation and strong scalability, it does not need external transceiver equipment of USART, CAN and other communication protocols. Now it is widely used in the communication between multiple integrated circuits (ICS) in the system.
2.I2C physical layer
Common connection modes between I2C communication equipment are as follows:
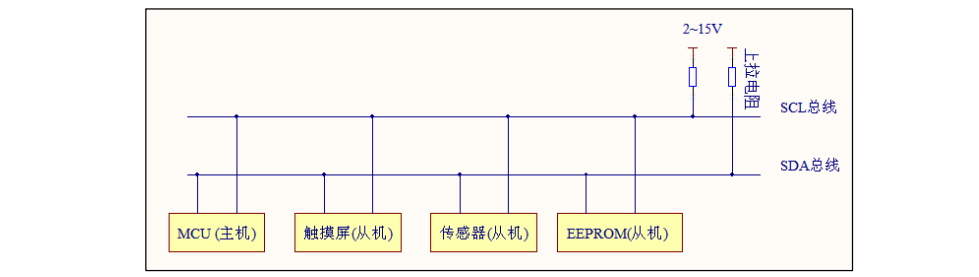
I2C is a bus that supports devices. It can connect multiple I2C communication devices and support multiple communication hosts and multiple communication slaves. For I2C bus, only two bus lines are used, one bidirectional serial data line (SDA) and one serial clock line (SCL).
3.I2C protocol layer
I2C protocol defines the start and stop signals of communication, data validity, response, arbitration, clock synchronization and address broadcasting
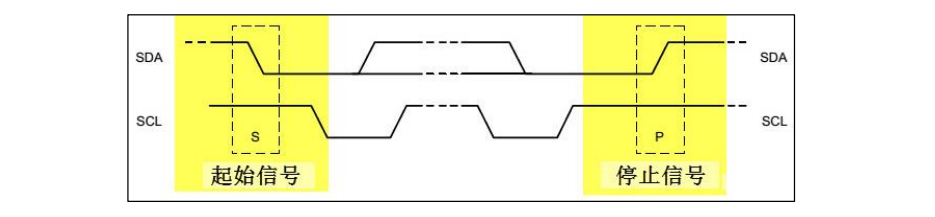
Start and stop signals of communication
Data validity

I2C uses SDA signal line to transmit data and SCL signal line to synchronize data. The SDA data line transmits one bit of data in each clock cycle of SCL. During transmission, the data represented by SDA is valid when SCL is high level, that is, SDA represents data "1" at high level and data "0" at low level. When SCL is at low level, SDA data is invalid. Generally, SDA performs level switching at this time to prepare for the next presentation of data.
4. Two ways of I2C - hardware I2C and software I2C
Hardware I2C
The I2C on-chip peripheral of STM32 is specially responsible for implementing the I2C communication protocol. As long as the peripheral is configured, it will automatically generate communication signals according to the protocol requirements, send and receive data and cache it. As long as the CPU detects the status of the peripheral and accesses the data register, it can complete data sending and receiving. This way of processing I2C protocol by hardware peripherals reduces the work of CPU and makes the software design simpler.
Transfer I2C
If the two GPIO pins of STM32 are directly controlled and used as SCL and SDA respectively, I2C communication can be realized by directly controlling the output of the pin like controlling the LED lamp (if the SDA level is read when receiving data) according to the timing requirements of the above signals. Similarly, if we control the pin according to the requirements of USART, USART communication can also be realized. Therefore, as long as the protocol is observed, it is standard communication. No matter how it is implemented, whether it is the controller produced by ST or the memory produced by ATMEL, it can interact according to the communication standard. When directly controlling the GPIO pin level to generate communication sequence, the CPU needs to control the pin state at each time, so it is called "software simulation protocol" mode.
The difference between the two
Hardware I2C directly uses peripherals to control pins, which can reduce the burden of CPU. However, when using hardware I2C, some fixed pins must be used as SCL and SDA, while software analog I2C can use any GPIO pin, which is relatively flexible. The usage of hardware I2C is more complex, and the flow of software I2C is clearer. If you want to understand I2C protocol in detail, you may better understand this process by using software I2C. In the process of using I2C, hardware I2C communication may be faster and more stable.
2, Data collection using AHT20
1. Learn about AHT20 chip
For specific information, please download the corresponding product introduction document. The data link is as follows
Temperature and humidity sensor temperature and humidity chip temperature and humidity transmitter module gas sensor flow sensor Guangzhou Aosong Electronics Co., Ltd
2. Connect hardware
Connect SCL, GND, SDA and VCC of AHT20 to PB6, GND, PB7 and 3.3V of STM32C8T6 respectively
3. Code
Add code on the blank project of firmware library version
The main functions are as follows:
main.c
#include "delay.h"
#include "usart.h"
#include "bsp_i2c.h"
int main(void)
{
delay_init(); //ÑÓʱº¯Êý³õʼ»¯
uart_init(115200); //´®¿Ú³õʼ»¯Îª115200
IIC_Init();
while(1)
{
printf("¿ªÊ¼²âÁ¿£¬ÇëÉԵȣº");
read_AHT20_once();
delay_ms(1500);
}
}
Then put the following code file together with main.c
usart.c
#include "sys.h"
#include "usart.h"
//STM32F103ºËÐÄ°åÀý³Ì
//¿âº¯Êý°æ±¾Àý³Ì
/********** mcudev.taobao.com ³öÆ· ********/
//
//Èç¹ûʹÓÃucos,Ôò°üÀ¨ÏÂÃæµÄÍ·Îļþ¼´¿É.
#if SYSTEM_SUPPORT_UCOS
#include "includes.h" //ucos ʹÓÃ
#endif
//
//STM32¿ª·¢°å
//´®¿Ú1³õʼ»¯
//
//
//¼ÓÈëÒÔÏ´úÂë,Ö§³Öprintfº¯Êý,¶ø²»ÐèҪѡÔñuse MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//±ê×¼¿âÐèÒªµÄÖ§³Öº¯Êý
struct __FILE
{
int handle;
};
FILE __stdout;
//¶¨Òå_sys_exit()ÒÔ±ÜÃâʹÓðëÖ÷»úģʽ
void _sys_exit(int x)
{
x = x;
}
//Öض¨Òåfputcº¯Êý
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//Ñ»··¢ËÍ,Ö±µ½·¢ËÍÍê±Ï
USART1->DR = (u8) ch;
return ch;
}
#endif
/*ʹÓÃmicroLibµÄ·½·¨*/
/*
int fputc(int ch, FILE *f)
{
USART_SendData(USART1, (uint8_t) ch);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET) {}
return ch;
}
int GetKey (void) {
while (!(USART1->SR & USART_FLAG_RXNE));
return ((int)(USART1->DR & 0x1FF));
}
*/
#if EN_USART1_RX //Èç¹ûʹÄÜÁ˽ÓÊÕ
//´®¿Ú1ÖжϷþÎñ³ÌÐò
//×¢Òâ,¶ÁÈ¡USARTx->SRÄܱÜÃâĪÃûÆäÃîµÄ´íÎó
u8 USART_RX_BUF[USART_REC_LEN]; //½ÓÊÕ»º³å,×î´óUSART_REC_LEN¸ö×Ö½Ú.
//½ÓÊÕ״̬
//bit15£¬ ½ÓÊÕÍê³É±êÖ¾
//bit14£¬ ½ÓÊÕµ½0x0d
//bit13~0£¬ ½ÓÊÕµ½µÄÓÐЧ×Ö½ÚÊýÄ¿
u16 USART_RX_STA=0; //½ÓÊÕ״̬±ê¼Ç
void uart_init(u32 bound){
//GPIO¶Ë¿ÚÉèÖÃ
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //ʹÄÜUSART1£¬GPIOAʱÖÓ
//USART1_TX PA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //¸´ÓÃÍÆÍìÊä³ö
GPIO_Init(GPIOA, &GPIO_InitStructure);
//USART1_RX PA.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//¸¡¿ÕÊäÈë
GPIO_Init(GPIOA, &GPIO_InitStructure);
//Usart1 NVIC ÅäÖÃ
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//ÇÀÕ¼ÓÅÏȼ¶3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //×ÓÓÅÏȼ¶3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQͨµÀʹÄÜ
NVIC_Init(&NVIC_InitStructure); //¸ù¾ÝÖ¸¶¨µÄ²ÎÊý³õʼ»¯VIC¼Ä´æÆ÷
//USART ³õʼ»¯ÉèÖÃ
USART_InitStructure.USART_BaudRate = bound;//Ò»°ãÉèÖÃΪ9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//×Ö³¤Îª8λÊý¾Ý¸ñʽ
USART_InitStructure.USART_StopBits = USART_StopBits_1;//Ò»¸öֹͣλ
USART_InitStructure.USART_Parity = USART_Parity_No;//ÎÞÆæżУÑéλ
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//ÎÞÓ²¼þÊý¾ÝÁ÷¿ØÖÆ
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //ÊÕ·¢Ä£Ê½
USART_Init(USART1, &USART_InitStructure); //³õʼ»¯´®¿Ú
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//¿ªÆôÖжÏ
USART_Cmd(USART1, ENABLE); //ʹÄÜ´®¿Ú
}
void USART1_IRQHandler(void) //´®¿Ú1ÖжϷþÎñ³ÌÐò
{
u8 Res;
#ifdef OS_TICKS_PER_SEC //Èç¹ûʱÖÓ½ÚÅÄÊý¶¨ÒåÁË,˵Ã÷ҪʹÓÃucosIIÁË.
OSIntEnter();
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //½ÓÊÕÖжÏ(½ÓÊÕµ½µÄÊý¾Ý±ØÐëÊÇ0x0d 0x0a½áβ)
{
Res =USART_ReceiveData(USART1);//(USART1->DR); //¶ÁÈ¡½ÓÊÕµ½µÄÊý¾Ý
if((USART_RX_STA&0x8000)==0)//½ÓÊÕδÍê³É
{
if(USART_RX_STA&0x4000)//½ÓÊÕµ½ÁË0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//½ÓÊÕ´íÎó,ÖØпªÊ¼
else USART_RX_STA|=0x8000; //½ÓÊÕÍê³ÉÁË
}
else //»¹Ã»ÊÕµ½0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//½ÓÊÕÊý¾Ý´íÎó,ÖØпªÊ¼½ÓÊÕ
}
}
}
}
#ifdef OS_TICKS_PER_SEC //Èç¹ûʱÖÓ½ÚÅÄÊý¶¨ÒåÁË,˵Ã÷ҪʹÓÃucosIIÁË.
OSIntExit();
#endif
}
#endif
usart.h
#ifndef __USART_H #define __USART_H #include "stdio.h" #include "sys.h" //STM32F103ºËÐÄ°åÀý³Ì //¿âº¯Êý°æ±¾Àý³Ì /********** mcudev.taobao.com ³öÆ· ********/ // //STM32¿ª·¢°å //´®¿Ú1³õʼ»¯ #define USART_REC_LEN 200 //¶¨Òå×î´ó½ÓÊÕ×Ö½ÚÊý 200 #define EN_USART1_RX 1 //ʹÄÜ£¨1£©/½ûÖ¹£¨0£©´®¿Ú1½ÓÊÕ extern u8 USART_RX_BUF[USART_REC_LEN]; //½ÓÊÕ»º³å,×î´óUSART_REC_LEN¸ö×Ö½Ú.Ä©×Ö½ÚΪ»»Ðзû extern u16 USART_RX_STA; //½ÓÊÕ״̬±ê¼Ç //Èç¹ûÏë´®¿ÚÖжϽÓÊÕ£¬Ç벻ҪעÊÍÒÔϺ궨Òå void uart_init(u32 bound); #endif
bsp_i2c.c
#include "bsp_i2c.h"
#include "delay.h"
uint8_t ack_status=0;
uint8_t readByte[6];
uint8_t AHT20_status=0;
uint32_t H1=0; //Humility
uint32_t T1=0; //Temperature
uint8_t AHT20_OutData[4];
uint8_t AHT20sendOutData[10] = {0xFA, 0x06, 0x0A, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF};
void IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; //ÍÆÍìÊä³ö
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
IIC_SCL=1;
IIC_SDA=1;
}
//²úÉúIICÆðʼÐźÅ
void IIC_Start(void)
{
SDA_OUT(); //sdaÏßÊä³ö
IIC_SDA=1;
IIC_SCL=1;
delay_us(4);
IIC_SDA=0;//START:when CLK is high,DATA change form high to low
delay_us(4);
IIC_SCL=0;//ǯסI2C×ÜÏߣ¬×¼±¸·¢ËÍ»ò½ÓÊÕÊý¾Ý
}
//²úÉúIICÍ£Ö¹ÐźÅ
void IIC_Stop(void)
{
SDA_OUT();//sdaÏßÊä³ö
IIC_SCL=0;
IIC_SDA=0;//STOP:when CLK is high DATA change form low to high
delay_us(4);
IIC_SCL=1;
IIC_SDA=1;//·¢ËÍI2C×ÜÏß½áÊøÐźÅ
delay_us(4);
}
//µÈ´ýÓ¦´ðÐźŵ½À´
//·µ»ØÖµ£º1£¬½ÓÊÕÓ¦´ðʧ°Ü
// 0£¬½ÓÊÕÓ¦´ð³É¹¦
u8 IIC_Wait_Ack(void)
{
u8 ucErrTime=0;
SDA_IN(); //SDAÉèÖÃΪÊäÈë
IIC_SDA=1;delay_us(1);
IIC_SCL=1;delay_us(1);
while(READ_SDA)
{
ucErrTime++;
if(ucErrTime>250)
{
IIC_Stop();
return 1;
}
}
IIC_SCL=0;//ʱÖÓÊä³ö0
return 0;
}
//²úÉúACKÓ¦´ð
void IIC_Ack(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=0;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
//²»²úÉúACKÓ¦´ð
void IIC_NAck(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=1;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
//IIC·¢ËÍÒ»¸ö×Ö½Ú
//·µ»Ø´Ó»úÓÐÎÞÓ¦´ð
//1£¬ÓÐÓ¦´ð
//0£¬ÎÞÓ¦´ð
void IIC_Send_Byte(u8 txd)
{
u8 t;
SDA_OUT();
IIC_SCL=0;//ÀµÍʱÖÓ¿ªÊ¼Êý¾Ý´«Êä
for(t=0;t<8;t++)
{
IIC_SDA=(txd&0x80)>>7;
txd<<=1;
delay_us(2); //¶ÔTEA5767ÕâÈý¸öÑÓʱ¶¼ÊDZØÐëµÄ
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
delay_us(2);
}
}
//¶Á1¸ö×Ö½Ú£¬ack=1ʱ£¬·¢ËÍACK£¬ack=0£¬·¢ËÍnACK
u8 IIC_Read_Byte(unsigned char ack)
{
unsigned char i,receive=0;
SDA_IN();//SDAÉèÖÃΪÊäÈë
for(i=0;i<8;i++ )
{
IIC_SCL=0;
delay_us(2);
IIC_SCL=1;
receive<<=1;
if(READ_SDA)receive++;
delay_us(1);
}
if (!ack)
IIC_NAck();//·¢ËÍnACK
else
IIC_Ack(); //·¢ËÍACK
return receive;
}
void IIC_WriteByte(uint16_t addr,uint8_t data,uint8_t device_addr)
{
IIC_Start();
if(device_addr==0xA0) //eepromµØÖ·´óÓÚ1×Ö½Ú
IIC_Send_Byte(0xA0 + ((addr/256)<<1));//·¢Ë͸ߵØÖ·
else
IIC_Send_Byte(device_addr); //·¢Æ÷¼þµØÖ·
IIC_Wait_Ack();
IIC_Send_Byte(addr&0xFF); //·¢Ë͵͵ØÖ·
IIC_Wait_Ack();
IIC_Send_Byte(data); //·¢ËÍ×Ö½Ú
IIC_Wait_Ack();
IIC_Stop();//²úÉúÒ»¸öÍ£Ö¹Ìõ¼þ
if(device_addr==0xA0) //
delay_ms(10);
else
delay_us(2);
}
uint16_t IIC_ReadByte(uint16_t addr,uint8_t device_addr,uint8_t ByteNumToRead) //¶Á¼Ä´æÆ÷»ò¶ÁÊý¾Ý
{
uint16_t data;
IIC_Start();
if(device_addr==0xA0)
IIC_Send_Byte(0xA0 + ((addr/256)<<1));
else
IIC_Send_Byte(device_addr);
IIC_Wait_Ack();
IIC_Send_Byte(addr&0xFF); //·¢Ë͵͵ØÖ·
IIC_Wait_Ack();
IIC_Start();
IIC_Send_Byte(device_addr+1); //·¢Æ÷¼þµØÖ·
IIC_Wait_Ack();
if(ByteNumToRead == 1)//LM75ζÈÊý¾ÝΪ11bit
{
data=IIC_Read_Byte(0);
}
else
{
data=IIC_Read_Byte(1);
data=(data<<8)+IIC_Read_Byte(0);
}
IIC_Stop();//²úÉúÒ»¸öÍ£Ö¹Ìõ¼þ
return data;
}
/**********
*ÉÏÃ沿·ÖΪIO¿ÚÄ£¿éI2CÅäÖÃ
*
*´ÓÕâÒÔÏ¿ªÊ¼ÎªAHT20µÄÅäÖÃI2C
*º¯ÊýÃûÓÐIICºÍI2CµÄÇø±ð£¬Çë×¢Ò⣡£¡£¡£¡£¡
*
*2020/2/23×îºóÐÞ¸ÄÈÕÆÚ
*
***********/
void read_AHT20_once(void)
{
delay_ms(10);
reset_AHT20();
delay_ms(10);
init_AHT20();
delay_ms(10);
startMeasure_AHT20();
delay_ms(80);
read_AHT20();
delay_ms(5);
}
void reset_AHT20(void)
{
I2C_Start();
I2C_WriteByte(0x70);
ack_status = Receive_ACK();
if(ack_status) printf("1");
else printf("1-n-");
I2C_WriteByte(0xBA);
ack_status = Receive_ACK();
if(ack_status) printf("2");
else printf("2-n-");
I2C_Stop();
/*
AHT20_OutData[0] = 0;
AHT20_OutData[1] = 0;
AHT20_OutData[2] = 0;
AHT20_OutData[3] = 0;
*/
}
void init_AHT20(void)
{
I2C_Start();
I2C_WriteByte(0x70);
ack_status = Receive_ACK();
if(ack_status) printf("3");
else printf("3-n-");
I2C_WriteByte(0xE1);
ack_status = Receive_ACK();
if(ack_status) printf("4");
else printf("4-n-");
I2C_WriteByte(0x08);
ack_status = Receive_ACK();
if(ack_status) printf("5");
else printf("5-n-");
I2C_WriteByte(0x00);
ack_status = Receive_ACK();
if(ack_status) printf("6");
else printf("6-n-");
I2C_Stop();
}
void startMeasure_AHT20(void)
{
//------------
I2C_Start();
I2C_WriteByte(0x70);
ack_status = Receive_ACK();
if(ack_status) printf("7");
else printf("7-n-");
I2C_WriteByte(0xAC);
ack_status = Receive_ACK();
if(ack_status) printf("8");
else printf("8-n-");
I2C_WriteByte(0x33);
ack_status = Receive_ACK();
if(ack_status) printf("9");
else printf("9-n-");
I2C_WriteByte(0x00);
ack_status = Receive_ACK();
if(ack_status) printf("10");
else printf("10-n-");
I2C_Stop();
}
void read_AHT20(void)
{
uint8_t i;
for(i=0; i<6; i++)
{
readByte[i]=0;
}
//-------------
I2C_Start();
I2C_WriteByte(0x71);
ack_status = Receive_ACK();
readByte[0]= I2C_ReadByte();
Send_ACK();
readByte[1]= I2C_ReadByte();
Send_ACK();
readByte[2]= I2C_ReadByte();
Send_ACK();
readByte[3]= I2C_ReadByte();
Send_ACK();
readByte[4]= I2C_ReadByte();
Send_ACK();
readByte[5]= I2C_ReadByte();
SendNot_Ack();
//Send_ACK();
I2C_Stop();
//--------------
if( (readByte[0] & 0x68) == 0x08 )
{
H1 = readByte[1];
H1 = (H1<<8) | readByte[2];
H1 = (H1<<8) | readByte[3];
H1 = H1>>4;
H1 = (H1*1000)/1024/1024;
T1 = readByte[3];
T1 = T1 & 0x0000000F;
T1 = (T1<<8) | readByte[4];
T1 = (T1<<8) | readByte[5];
T1 = (T1*2000)/1024/1024 - 500;
AHT20_OutData[0] = (H1>>8) & 0x000000FF;
AHT20_OutData[1] = H1 & 0x000000FF;
AHT20_OutData[2] = (T1>>8) & 0x000000FF;
AHT20_OutData[3] = T1 & 0x000000FF;
}
else
{
AHT20_OutData[0] = 0xFF;
AHT20_OutData[1] = 0xFF;
AHT20_OutData[2] = 0xFF;
AHT20_OutData[3] = 0xFF;
printf("ʧ°ÜÁË");
}
printf("\r\n");
printf("ζÈ:%d%d.%d",T1/100,(T1/10)%10,T1%10);
printf("ʪ¶È:%d%d.%d",H1/100,(H1/10)%10,H1%10);
printf("\r\n");
}
uint8_t Receive_ACK(void)
{
uint8_t result=0;
uint8_t cnt=0;
IIC_SCL = 0;
SDA_IN();
delay_us(4);
IIC_SCL = 1;
delay_us(4);
while(READ_SDA && (cnt<100))
{
cnt++;
}
IIC_SCL = 0;
delay_us(4);
if(cnt<100)
{
result=1;
}
return result;
}
void Send_ACK(void)
{
SDA_OUT();
IIC_SCL = 0;
delay_us(4);
IIC_SDA = 0;
delay_us(4);
IIC_SCL = 1;
delay_us(4);
IIC_SCL = 0;
delay_us(4);
SDA_IN();
}
void SendNot_Ack(void)
{
SDA_OUT();
IIC_SCL = 0;
delay_us(4);
IIC_SDA = 1;
delay_us(4);
IIC_SCL = 1;
delay_us(4);
IIC_SCL = 0;
delay_us(4);
IIC_SDA = 0;
delay_us(4);
}
void I2C_WriteByte(uint8_t input)
{
uint8_t i;
SDA_OUT();
for(i=0; i<8; i++)
{
IIC_SCL = 0;
delay_ms(5);
if(input & 0x80)
{
IIC_SDA = 1;
//delaymm(10);
}
else
{
IIC_SDA = 0;
//delaymm(10);
}
IIC_SCL = 1;
delay_ms(5);
input = (input<<1);
}
IIC_SCL = 0;
delay_us(4);
SDA_IN();
delay_us(4);
}
uint8_t I2C_ReadByte(void)
{
uint8_t resultByte=0;
uint8_t i=0, a=0;
IIC_SCL = 0;
SDA_IN();
delay_ms(4);
for(i=0; i<8; i++)
{
IIC_SCL = 1;
delay_ms(3);
a=0;
if(READ_SDA)
{
a=1;
}
else
{
a=0;
}
//resultByte = resultByte | a;
resultByte = (resultByte << 1) | a;
IIC_SCL = 0;
delay_ms(3);
}
SDA_IN();
delay_ms(10);
return resultByte;
}
void set_AHT20sendOutData(void)
{
/* --------------------------
* 0xFA 0x06 0x0A temperature(2 Bytes) humility(2Bytes) short Address(2 Bytes)
* And Check (1 byte)
* -------------------------*/
AHT20sendOutData[3] = AHT20_OutData[0];
AHT20sendOutData[4] = AHT20_OutData[1];
AHT20sendOutData[5] = AHT20_OutData[2];
AHT20sendOutData[6] = AHT20_OutData[3];
// AHT20sendOutData[7] = (drf1609.shortAddress >> 8) & 0x00FF;
// AHT20sendOutData[8] = drf1609.shortAddress & 0x00FF;
// AHT20sendOutData[9] = getXY(AHT20sendOutData,10);
}
void I2C_Start(void)
{
SDA_OUT();
IIC_SCL = 1;
delay_ms(4);
IIC_SDA = 1;
delay_ms(4);
IIC_SDA = 0;
delay_ms(4);
IIC_SCL = 0;
delay_ms(4);
}
void I2C_Stop(void)
{
SDA_OUT();
IIC_SDA = 0;
delay_ms(4);
IIC_SCL = 1;
delay_ms(4);
IIC_SDA = 1;
delay_ms(4);
}
bsp_i2c.h
#ifndef __BSP_I2C_H
#define __BSP_I2C_H
#include "sys.h"
#include "delay.h"
#include "usart.h"
//ʹÓÃIIC1 ¹ÒÔØM24C02,OLED,LM75AD,HT1382 PB6,PB7
#define SDA_IN() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)8<<28;}
#define SDA_OUT() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)3<<28;}
//IO²Ù×÷º¯Êý
#define IIC_SCL PBout(6) //SCL
#define IIC_SDA PBout(7) //SDA
#define READ_SDA PBin(7) //ÊäÈëSDA
//IICËùÓвÙ×÷º¯Êý
void IIC_Init(void); //³õʼ»¯IICµÄIO¿Ú
void IIC_Start(void); //·¢ËÍIIC¿ªÊ¼ÐźÅ
void IIC_Stop(void); //·¢ËÍIICÍ£Ö¹ÐźÅ
void IIC_Send_Byte(u8 txd); //IIC·¢ËÍÒ»¸ö×Ö½Ú
u8 IIC_Read_Byte(unsigned char ack);//IIC¶ÁÈ¡Ò»¸ö×Ö½Ú
u8 IIC_Wait_Ack(void); //IICµÈ´ýACKÐźÅ
void IIC_Ack(void); //IIC·¢ËÍACKÐźÅ
void IIC_NAck(void); //IIC²»·¢ËÍACKÐźÅ
void IIC_WriteByte(uint16_t addr,uint8_t data,uint8_t device_addr);
uint16_t IIC_ReadByte(uint16_t addr,uint8_t device_addr,uint8_t ByteNumToRead);//¼Ä´æÆ÷µØÖ·£¬Æ÷¼þµØÖ·£¬Òª¶ÁµÄ×Ö½ÚÊý
void read_AHT20_once(void);
void reset_AHT20(void);
void init_AHT20(void);
void startMeasure_AHT20(void);
void read_AHT20(void);
uint8_t Receive_ACK(void);
void Send_ACK(void);
void SendNot_Ack(void);
void I2C_WriteByte(uint8_t input);
uint8_t I2C_ReadByte(void);
void set_AHT20sendOutData(void);
void I2C_Start(void);
void I2C_Stop(void);
#endif
delay.c
#include "delay.h"
#include "sys.h"
//STM32F103ºËÐÄ°åÀý³Ì
//¿âº¯Êý°æ±¾Àý³Ì
/********** mcudev.taobao.com ³öÆ· ********/
//
//Èç¹ûʹÓÃucos,Ôò°üÀ¨ÏÂÃæµÄÍ·Îļþ¼´¿É.
#if SYSTEM_SUPPORT_UCOS
#include "includes.h" //ucos ʹÓÃ
#endif
//
//STM32¿ª·¢°å
//ʹÓÃSysTickµÄÆÕͨ¼ÆÊýģʽ¶ÔÑÓ³Ù½øÐйÜÀí
//°üÀ¨delay_us,delay_ms
//
static u8 fac_us=0;//usÑÓʱ±¶³ËÊý
static u16 fac_ms=0;//msÑÓʱ±¶³ËÊý
#ifdef OS_CRITICAL_METHOD //Èç¹ûOS_CRITICAL_METHOD¶¨ÒåÁË,˵Ã÷ʹÓÃucosIIÁË.
//systickÖжϷþÎñº¯Êý,ʹÓÃucosʱÓõ½
void SysTick_Handler(void)
{
OSIntEnter(); //½øÈëÖжÏ
OSTimeTick(); //µ÷ÓÃucosµÄʱÖÓ·þÎñ³ÌÐò
OSIntExit(); //´¥·¢ÈÎÎñÇл»ÈíÖжÏ
}
#endif
//³õʼ»¯ÑÓ³Ùº¯Êý
//µ±Ê¹ÓÃucosµÄʱºò,´Ëº¯Êý»á³õʼ»¯ucosµÄʱÖÓ½ÚÅÄ
//SYSTICKµÄʱÖӹ̶¨ÎªHCLKʱÖÓµÄ1/8
//SYSCLK:ϵͳʱÖÓ
void delay_init()
{
#ifdef OS_CRITICAL_METHOD //Èç¹ûOS_CRITICAL_METHOD¶¨ÒåÁË,˵Ã÷ʹÓÃucosIIÁË.
u32 reload;
#endif
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8); //Ñ¡ÔñÍⲿʱÖÓ HCLK/8
fac_us=SystemCoreClock/8000000; //ΪϵͳʱÖÓµÄ1/8
#ifdef OS_CRITICAL_METHOD //Èç¹ûOS_CRITICAL_METHOD¶¨ÒåÁË,˵Ã÷ʹÓÃucosIIÁË.
reload=SystemCoreClock/8000000; //ÿÃëÖӵļÆÊý´ÎÊý µ¥Î»ÎªK
reload*=1000000/OS_TICKS_PER_SEC;//¸ù¾ÝOS_TICKS_PER_SECÉ趨Òç³öʱ¼ä
//reloadΪ24λ¼Ä´æÆ÷,×î´óÖµ:16777216,ÔÚ72MÏÂ,Ô¼ºÏ1.86s×óÓÒ
fac_ms=1000/OS_TICKS_PER_SEC;//´ú±íucos¿ÉÒÔÑÓʱµÄ×îÉÙµ¥Î»
SysTick->CTRL|=SysTick_CTRL_TICKINT_Msk; //¿ªÆôSYSTICKÖжÏ
SysTick->LOAD=reload; //ÿ1/OS_TICKS_PER_SECÃëÖжÏÒ»´Î
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk; //¿ªÆôSYSTICK
#else
fac_ms=(u16)fac_us*1000;//·ÇucosÏÂ,´ú±íÿ¸ömsÐèÒªµÄsystickʱÖÓÊý
#endif
}
#ifdef OS_CRITICAL_METHOD //ʹÓÃÁËucos
//ÑÓʱnus
//nusΪҪÑÓʱµÄusÊý.
void delay_us(u32 nus)
{
u32 ticks;
u32 told,tnow,tcnt=0;
u32 reload=SysTick->LOAD; //LOADµÄÖµ
ticks=nus*fac_us; //ÐèÒªµÄ½ÚÅÄÊý
tcnt=0;
told=SysTick->VAL; //¸Õ½øÈëʱµÄ¼ÆÊýÆ÷Öµ
while(1)
{
tnow=SysTick->VAL;
if(tnow!=told)
{
if(tnow<told)tcnt+=told-tnow;//ÕâÀï×¢ÒâÒ»ÏÂSYSTICKÊÇÒ»¸öµÝ¼õµÄ¼ÆÊýÆ÷¾Í¿ÉÒÔÁË.
else tcnt+=reload-tnow+told;
told=tnow;
if(tcnt>=ticks)break;//ʱ¼ä³¬¹ý/µÈÓÚÒªÑÓ³ÙµÄʱ¼ä,ÔòÍ˳ö.
}
};
}
//ÑÓʱnms
//nms:ÒªÑÓʱµÄmsÊý
void delay_ms(u16 nms)
{
if(OSRunning==TRUE)//Èç¹ûosÒѾÔÚÅÜÁË
{
if(nms>=fac_ms)//ÑÓʱµÄʱ¼ä´óÓÚucosµÄ×îÉÙʱ¼äÖÜÆÚ
{
OSTimeDly(nms/fac_ms);//ucosÑÓʱ
}
nms%=fac_ms; //ucosÒѾÎÞ·¨ÌṩÕâôСµÄÑÓʱÁË,²ÉÓÃÆÕͨ·½Ê½ÑÓʱ
}
delay_us((u32)(nms*1000)); //ÆÕͨ·½Ê½ÑÓʱ,´ËʱucosÎÞ·¨Æô¶¯µ÷¶È.
}
#else//²»ÓÃucosʱ
//ÑÓʱnus
//nusΪҪÑÓʱµÄusÊý.
void delay_us(u32 nus)
{
u32 temp;
SysTick->LOAD=nus*fac_us; //ʱ¼ä¼ÓÔØ
SysTick->VAL=0x00; //Çå¿Õ¼ÆÊýÆ÷
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //¿ªÊ¼µ¹Êý
do
{
temp=SysTick->CTRL;
}
while(temp&0x01&&!(temp&(1<<16)));//µÈ´ýʱ¼äµ½´ï
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //¹Ø±Õ¼ÆÊýÆ÷
SysTick->VAL =0X00; //Çå¿Õ¼ÆÊýÆ÷
}
//ÑÓʱnms
//×¢ÒânmsµÄ·¶Î§
//SysTick->LOADΪ24λ¼Ä´æÆ÷,ËùÒÔ,×î´óÑÓʱΪ:
//nms<=0xffffff*8*1000/SYSCLK
//SYSCLKµ¥Î»ÎªHz,nmsµ¥Î»Îªms
//¶Ô72MÌõ¼þÏÂ,nms<=1864
void delay_ms(u16 nms)
{
u32 temp;
SysTick->LOAD=(u32)nms*fac_ms;//ʱ¼ä¼ÓÔØ(SysTick->LOADΪ24bit)
SysTick->VAL =0x00; //Çå¿Õ¼ÆÊýÆ÷
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //¿ªÊ¼µ¹Êý
do
{
temp=SysTick->CTRL;
}
while(temp&0x01&&!(temp&(1<<16)));//µÈ´ýʱ¼äµ½´ï
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //¹Ø±Õ¼ÆÊýÆ÷
SysTick->VAL =0X00; //Çå¿Õ¼ÆÊýÆ÷
}
#endif
delay.h
#ifndef __DELAY_H #define __DELAY_H #include "sys.h" // //STM32F103ºËÐÄ°åÀý³Ì //¿âº¯Êý°æ±¾Àý³Ì /********** mcudev.taobao.com ³öÆ· ********/ //ʹÓÃSysTickµÄÆÕͨ¼ÆÊýģʽ¶ÔÑÓ³Ù½øÐйÜÀí //°üÀ¨delay_us,delay_ms // void delay_init(void); void delay_ms(u16 nms); void delay_us(u32 nus); #endif
sys.c
#include "sys.h"
//STM32F103ºËÐÄ°åÀý³Ì
//¿âº¯Êý°æ±¾Àý³Ì
/********** mcudev.taobao.com ³öÆ· ********/
//
//STM32¿ª·¢°å
//ϵͳÖжϷÖ×éÉèÖû¯
//********************************************************************************
void NVIC_Configuration(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //ÉèÖÃNVICÖжϷÖ×é2:2λÇÀÕ¼ÓÅÏȼ¶£¬2λÏìÓ¦ÓÅÏȼ¶
}
sys.h
#ifndef __SYS_H #define __SYS_H #include "stm32f10x.h" // //STM32F103ºËÐÄ°åÀý³Ì //¿âº¯Êý°æ±¾Àý³Ì /********** mcudev.taobao.com ³öÆ· ********/ // //0,²»Ö§³Öucos //1,Ö§³Öucos #define SYSTEM_SUPPORT_UCOS 0 //¶¨ÒåϵͳÎļþ¼ÐÊÇ·ñÖ§³ÖUCOS //λ´ø²Ù×÷,ʵÏÖ51ÀàËƵÄGPIO¿ØÖƹ¦ÄÜ //¾ßÌåʵÏÖ˼Ïë,²Î¿¼<<CM3ȨÍþÖ¸ÄÏ>>µÚÎåÕÂ(87Ò³~92Ò³). //IO¿Ú²Ù×÷ºê¶¨Òå #define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2)) #define MEM_ADDR(addr) *((volatile unsigned long *)(addr)) #define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum)) //IO¿ÚµØÖ·Ó³Éä #define GPIOA_ODR_Addr (GPIOA_BASE+12) //0x4001080C #define GPIOB_ODR_Addr (GPIOB_BASE+12) //0x40010C0C #define GPIOC_ODR_Addr (GPIOC_BASE+12) //0x4001100C #define GPIOD_ODR_Addr (GPIOD_BASE+12) //0x4001140C #define GPIOE_ODR_Addr (GPIOE_BASE+12) //0x4001180C #define GPIOF_ODR_Addr (GPIOF_BASE+12) //0x40011A0C #define GPIOG_ODR_Addr (GPIOG_BASE+12) //0x40011E0C #define GPIOA_IDR_Addr (GPIOA_BASE+8) //0x40010808 #define GPIOB_IDR_Addr (GPIOB_BASE+8) //0x40010C08 #define GPIOC_IDR_Addr (GPIOC_BASE+8) //0x40011008 #define GPIOD_IDR_Addr (GPIOD_BASE+8) //0x40011408 #define GPIOE_IDR_Addr (GPIOE_BASE+8) //0x40011808 #define GPIOF_IDR_Addr (GPIOF_BASE+8) //0x40011A08 #define GPIOG_IDR_Addr (GPIOG_BASE+8) //0x40011E08 //IO¿Ú²Ù×÷,Ö»¶Ôµ¥Ò»µÄIO¿Ú! //È·±£nµÄֵСÓÚ16! #define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //Êä³ö #define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //ÊäÈë #define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //Êä³ö #define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //ÊäÈë #define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //Êä³ö #define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //ÊäÈë #define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //Êä³ö #define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //ÊäÈë #define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //Êä³ö #define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //ÊäÈë #define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //Êä³ö #define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //ÊäÈë #define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n) //Êä³ö #define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) //ÊäÈë void NVIC_Configuration(void); #endif
Then put usart.c, bsp_i2c.c, delay.c, sys.c are added to the project file
Burn the generated hex file into stm32, open the serial port debugging assistant, and you can see the experimental results

3, Summary
Understand some knowledge of I2C protocol, learn the use of AHT, and use the online template code