[OpenCV] detailed explanation and principle analysis of MatchTemplate function parameters
MatchTemplate
MatchTemplate(InputArray image, InputArray templ, OutputArray result, int method);
Image: enter an image to be matched, which supports 8U or 32F.
templ: enter a template image of the same type as image.
result: output the matrix of saved results, type 32F.
Method: the data comparison method to use.
1.result:
Result is a result matrix, assuming that the image to be matched is I, the width and height are (W, H), the template image is T, and the width and height are (W, H). Then the size of the result is (W-w+1,H-h+1).
2.method
TM_CCORR:
**Cross correlation algorithm** Cross correlation is a classical statistical matching algorithm, which determines the matching degree by calculating the cross-correlation between the template image and the matching image. The position of the search window at the maximum cross-correlation determines the position of the template image in the image to be matched.
characteristic
Be good at distinguishing different areas (with color differences).
TM_SQDIFF:
Error sum of squares algorithm Sum of Squared Differences (SSD algorithm for short), also known as difference sum algorithm
advantage
- The idea is simple and easy to understand (the sum of the absolute values of the difference between gray values at the corresponding position of the sub image and the template image, and then calculate the average).
- The operation process is simple and the matching accuracy is high.
shortcoming
- The amount of computation is too large.
- Very sensitive to noise.
TM_CCOEFF
Mean shifted cross correlation [Pearson correlation coefficient]. Cross correlation algorithm and Mean shift algorithm The combination of.
advantage
The algorithm is simple and easy to implement, and is suitable for real-time tracking
shortcoming
Tracking small targets and fast moving targets often fails, and can not recover tracking under all occlusion
TM_CCORR_NORMED
Normalized cross correlation (NCC) matching algorithm.
It is a linear invariant of brightness and contrast.
The disadvantage of this algorithm is that there are many feature points involved in the operation, and the operation speed is relatively slow.
Other normalization algorithms
TM_ SQDIFF_ Normalized and TM_CCOEFF_NORMED
Experimental comparison
Use trackbar to adjust different method s
const char* trackbar_label = "Method: \n 0: SQDIFF \n 1: SQDIFF NORMED \n 2: TM CCORR \n 3: TM CCORR NORMED \n 4: TM COEFF \n 5: TM COEFF NORMED"; createTrackbar(trackbar_label, image_window, &match_method, max_Trackbar, MatchingMethod); MatchingMethod(0, 0);
template matching
void MatchingMethod(int, void*)
{
Mat img_display;
img.copyTo(img_display);
int result_cols = img.cols - templ.cols + 1;
int result_rows = img.rows - templ.rows + 1;
result.create(result_rows, result_cols, CV_32FC1);
matchTemplate(img, templ, result, match_method);
normalize(result, result, 0, 1, NORM_MINMAX, -1, Mat());//Normalize the results to prevent overflow
double minVal; double maxVal; Point minLoc; Point maxLoc;
Point matchLoc;
minMaxLoc(result, &minVal, &maxVal, &minLoc, &maxLoc, Mat());//Different methods correspond to different minimum and maximum values
if (match_method == TM_SQDIFF || match_method == TM_SQDIFF_NORMED)
{
matchLoc = minLoc;
}
else
{
matchLoc = maxLoc;
}
rectangle(img_display, matchLoc, Point(matchLoc.x + templ.cols, matchLoc.y + templ.rows), Scalar::all(0), 2, 8, 0);//draw rectangle
// rectangle(result, matchLoc, Point(matchLoc.x + templ.cols, matchLoc.y + templ.rows), Scalar::all(0), 2, 8, 0);
imshow(image_window, img_display);
imshow(result_window, result);
imshow("template", templ);
return;
}
experimental result
TM_SQDIFF (mode 0) and TM_ CCOEFF_ Compared with normalized (mode 5):
TM_SQDIFF:
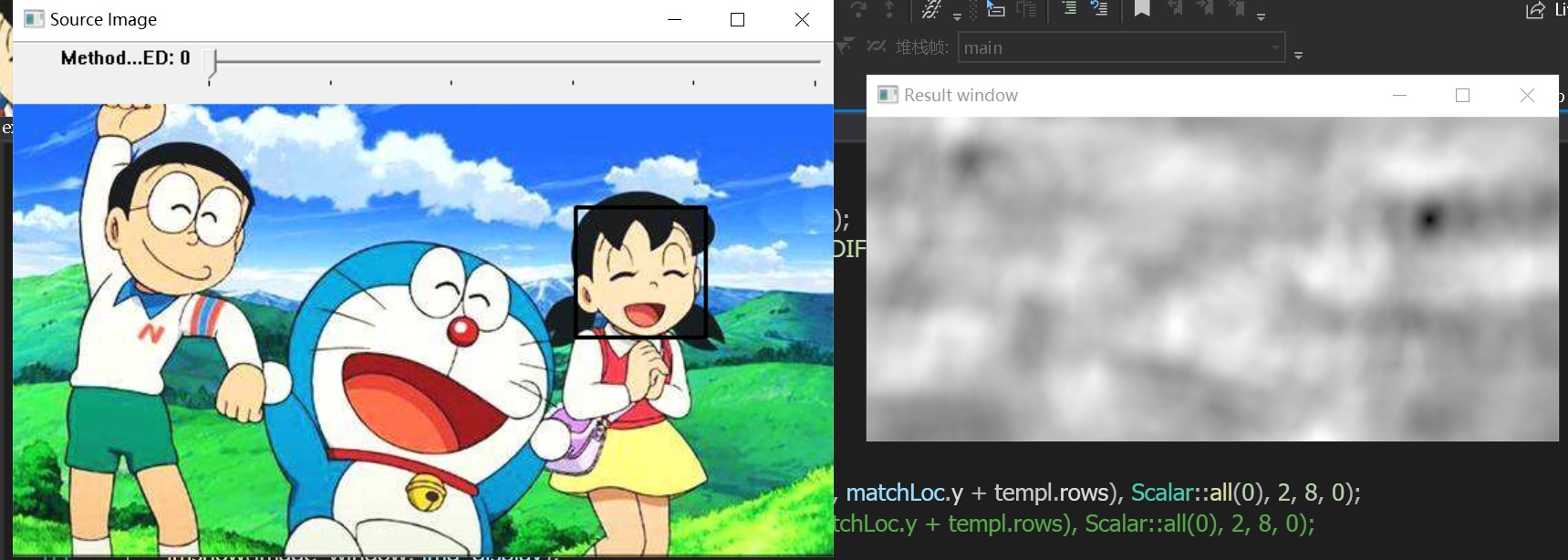
0 corresponds to the most matched position;
TM_CCOEFF_NORMED:
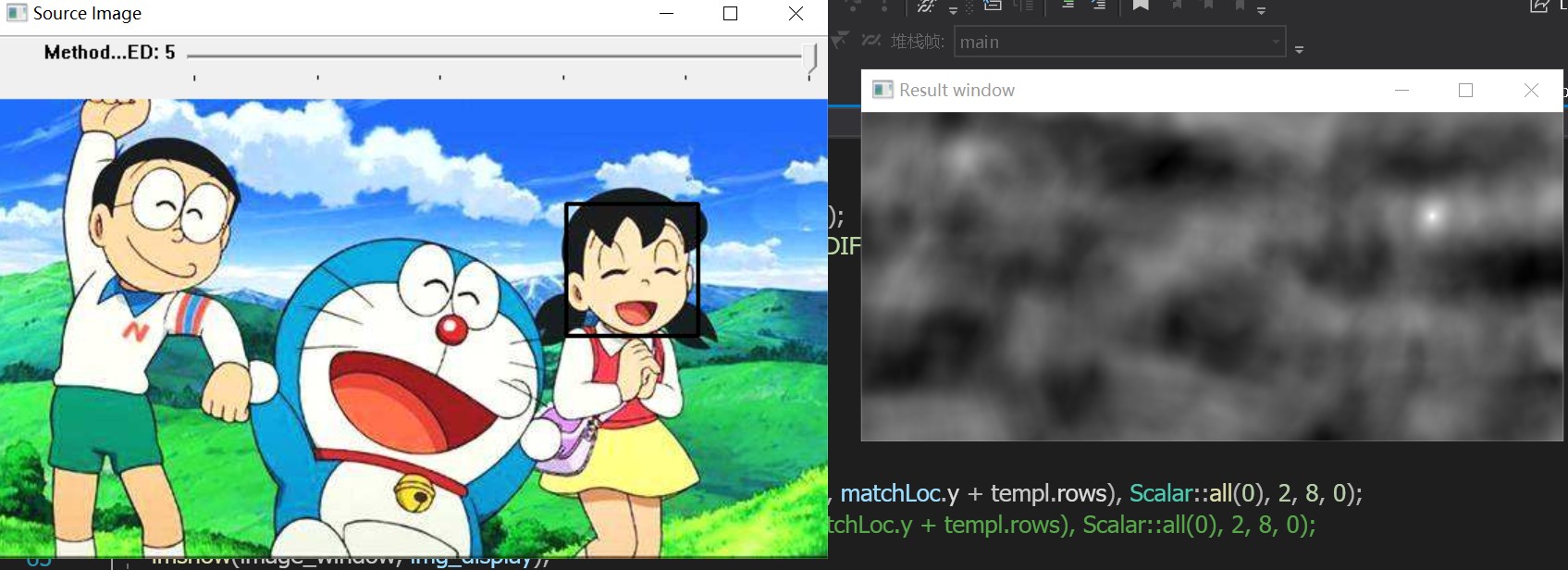
1 corresponds to the most matched position;
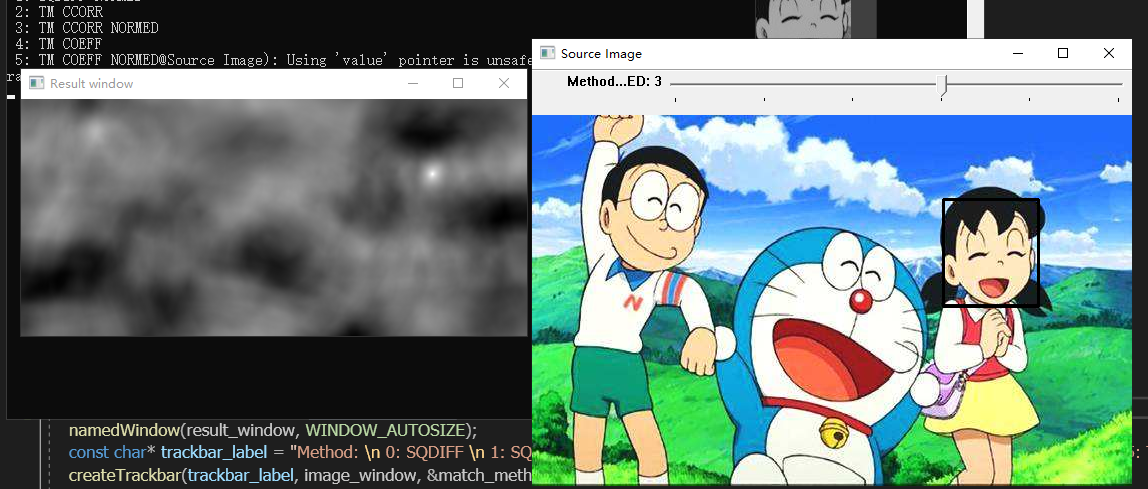
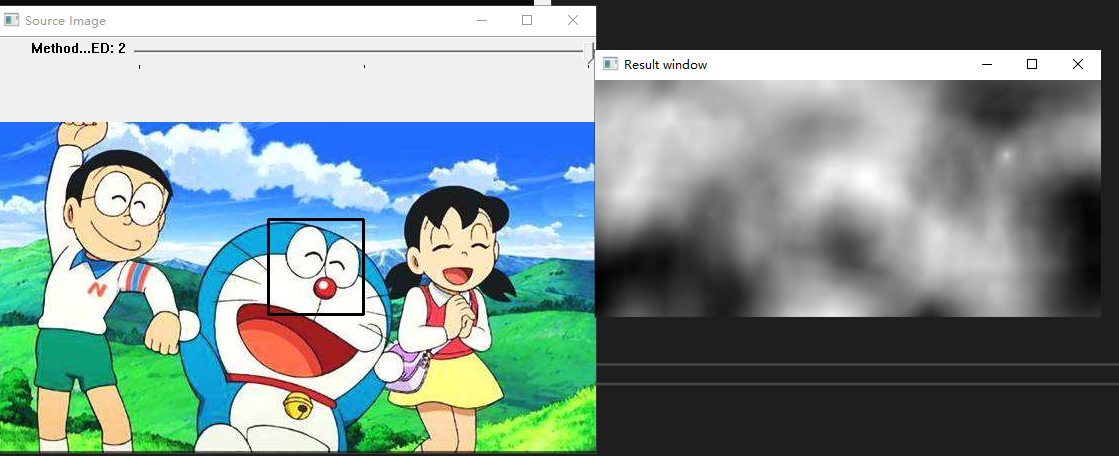
After the template color changes:

TM_CCORR (mode2) color discrimination is not obvious, resulting in matching error:

TM_CCORR_normal(3) correct:
Different matching values are different, but the correct region can be recognized generally.
Use your own avatar deformation to test the influence of deformation on template matching, and the results are roughly the same as above.