Original link: http://tecdat.cn/?p=24162
In this example, we consider Markov transformation stochastic volatility model.
statistical model
Let yt be the dependent variable and xt be the unobserved logarithmic volatility of yt. For t ≤ tmax, the stochastic volatility model is defined as follows
The state variable ct follows a two state Markov process with transition probability

N(m, σ 2) Represents the mean M And variance σ Normal distribution of 2.
BUGS language statistical model
File content ' vol.bug':
dlfie = 'vol.bug' #BUGS model file name
set up
Seed random number generator for repeatability
set.seed(0)
Load models and data
model parameter
dt = lst(t\_mx=t\_mx, sa=sima, alha=alpa, phi=pi, pi=pi, c0=c0, x0=x0)
Parse and compile BUGS model and sample data
modl(mol\_le, ata,sl\_da=T)
Draw data
plot(1:tmx, y, tpe='l',xx = 'n')
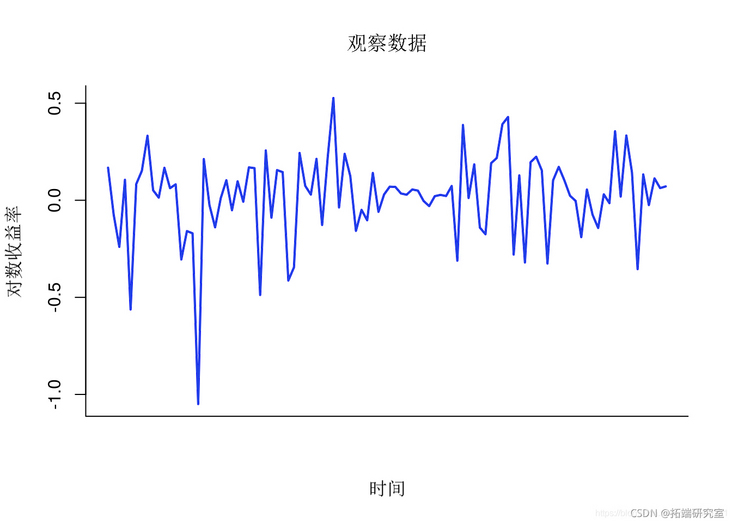
Logarithmic rate of return
Sequential Monte Carlo_ Sequential Monte Carlo_
function
n= 5000 # Number of particles
var= c('x') # Variables to monitor
out = smc(moe, vra, n)
Model diagnosis
diagnosis(out)

Drawing smoothing ESS
plt(ess, tpe='l') lins(1:ta, ep(0,tmx))
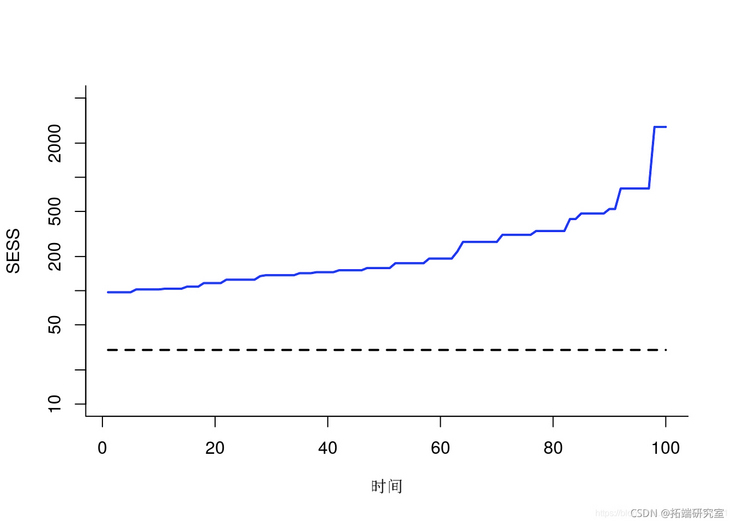
SMC: SESS
Paint weighted particles
plt(1:tax, out,)
for (t in 1:_ax) {
vl = uiq(valest,\])
wit = sply(vl, UN=(x) {
id = utm$$sles\[t,\] == x
rtrn(sm(wiht\[t,ind\]))
})
pints(va)
}
lies(1t_x, at$xue)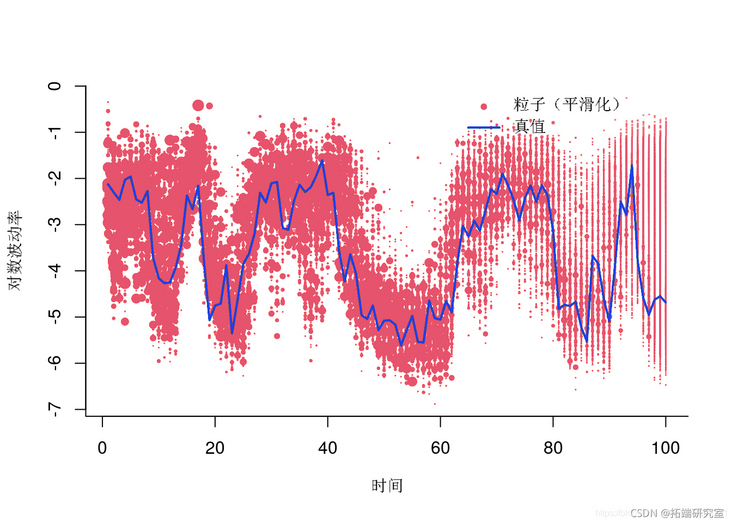
Particles (smooth)
Summary statistics
summary(out)
Mapping filter estimation
men = mean qan = quant x = c(1:tmx, _a:1) y = c(fnt, ev(x__qat)) plot(x, y) pln(x, y, col) lines(1:tma,x_ean)
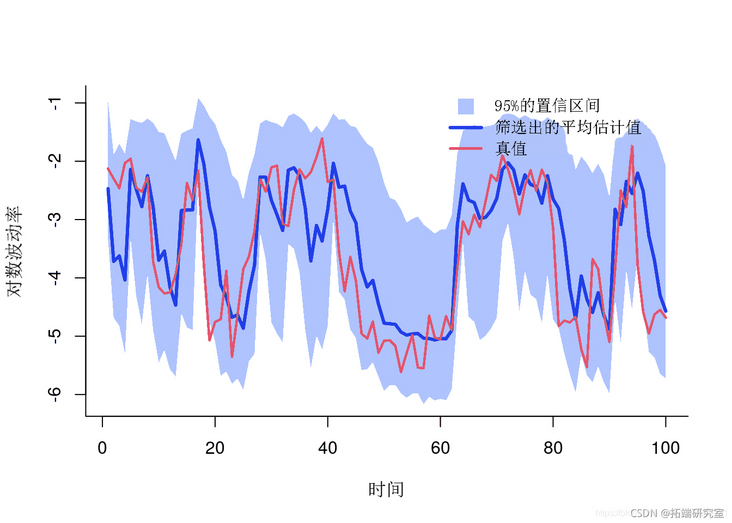
Filter estimation
Mapping smoothing estimation
plt(x,y, type='') polgon(x, y) lins(1:tmx, mean)
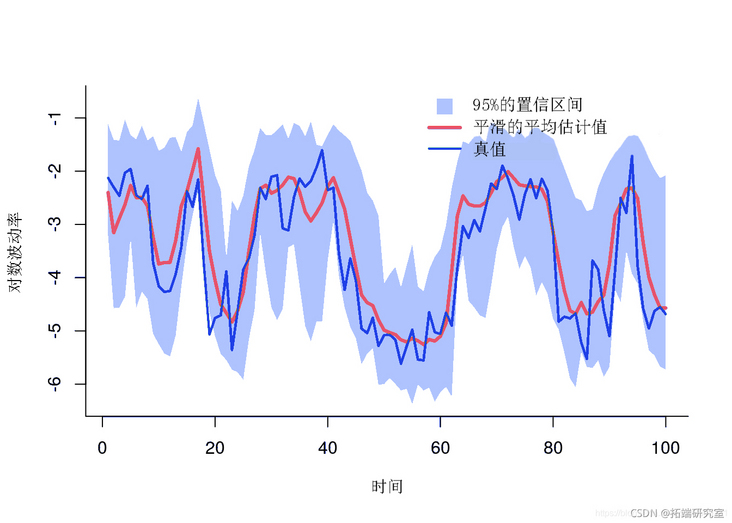
Smoothing estimation
Edge filtering and smoothing density
denty(out)
indx = c(5, 10, 15)
for (k in 1:legh) {
inex
plt(x)
pints(xtrue\[k\])
}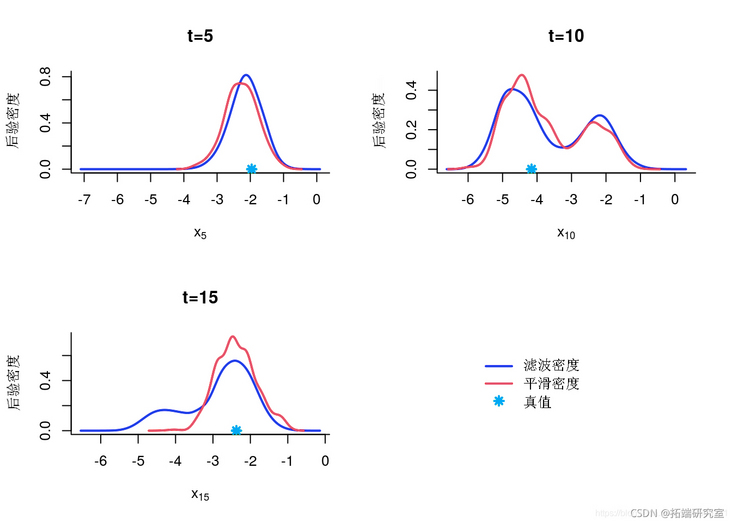
Marginal posterior
Particle independent metropolis Hastings
function
mh = mit(mol, vre)

mh(bm, brn, prt) # Pre burn iteration

mh(bh, ni, n_at, hn=tn) # Return sample

Some summary statistics
smay(otmh, pro=c(.025, .975))
Posterior mean and quantile
mean quant plot(x, y) polo(x, y, border=NA) lis(1:tax, mean)
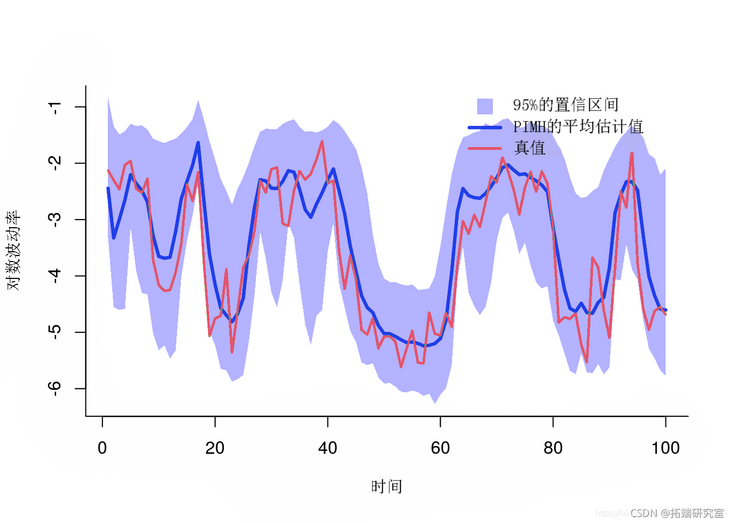
Posterior mean and quantile
Trace map of MCMC samples
for (k in 1:length {
tk = idx\[k\]
plot(out\[tk,\]
)
points(0, xtetk)
}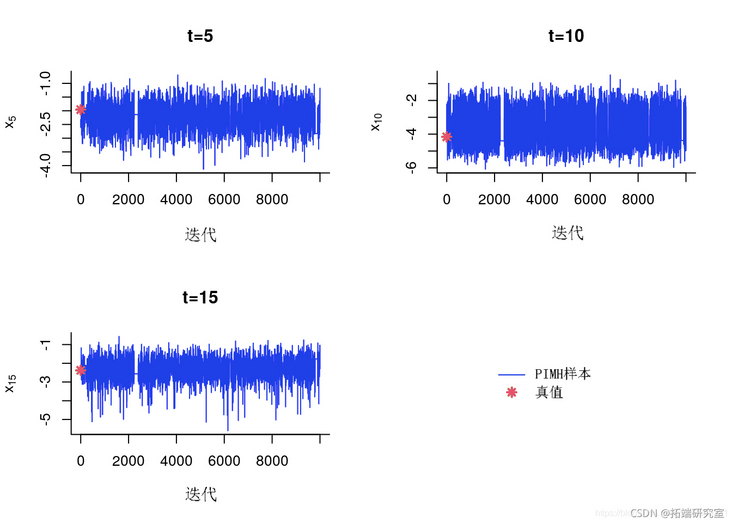
Tracking sample
A posteriori histogram
for (k in 1:lngh) {
k = inex\[k\]
hit(mh$x\[t,\])
poits(true\[t\])
}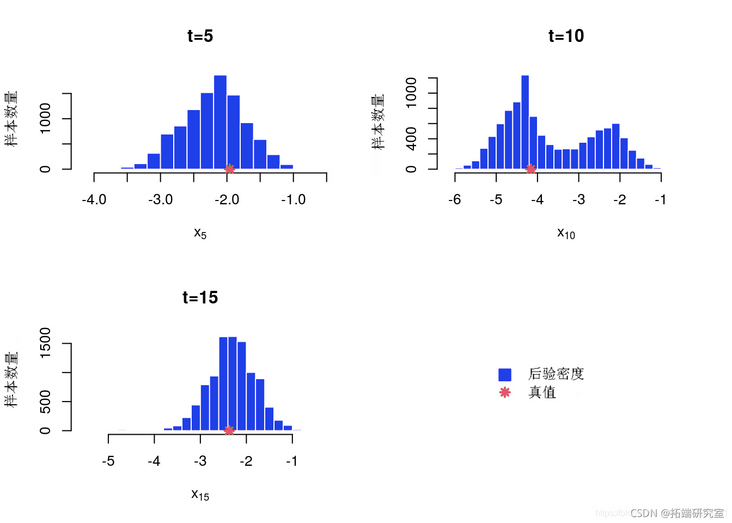
Back edge histogram
A posteriori kernel density estimation
for (k in 1:lnth(ie)) {
idx\[k\]
desty(out\[t,\])
plt(eim)
poit(xtu\[t\])
}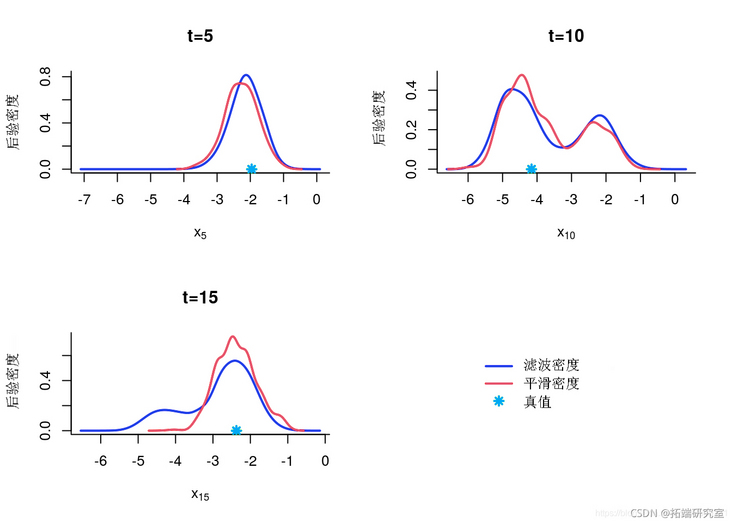
KDE posterior edge estimation
sensitivity analysis
We want to study the parameters α Value sensitivity
Algorithm parameters
nr = 50 # Number of particles
gd <- seq(-5,2,.2) # A numerical grid of components
A = rep(grd, tes=leg) # Value of the first component
B = rep(grd, eah=lnh) # Value of the second component
vaue = ist('lph' = rid(A, B))Operational Sensitivity Analysis
sny(oel,aaval, ar)

Plot LOG edge likelihood and penalty LOG edge likelihood
# Avoid standardization problems through threshold processing thr = -40 z = atx(mx(thr, utike), row=enth(rd))

plot(z, row=grd, col=grd, at=sq(thr))
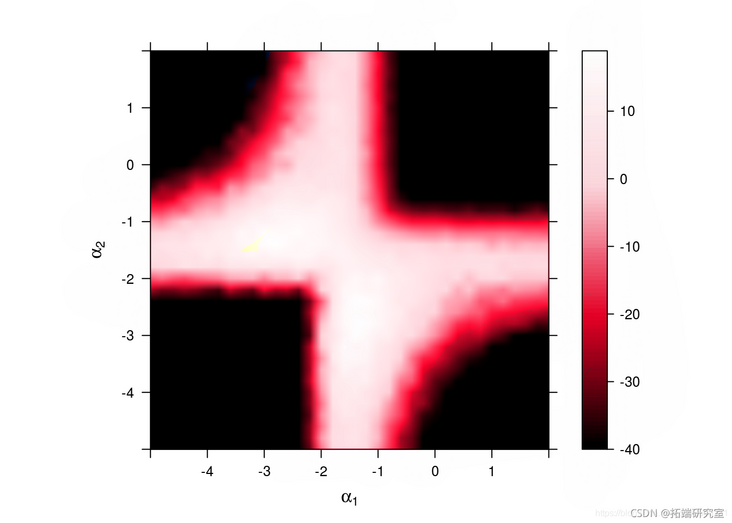
Sensitivity: log likelihood
Most popular insights
2.WinBUGS on multivariate stochastic volatility model: Bayesian estimation and model comparison
3.Realization of Volatility: ARCH model and HAR-RV model
5.R language stochastic volatility model SV is used to deal with stochastic volatility in time series
6.R language multivariate COPULA GARCH model time series prediction
7.VAR fitting and prediction based on ARMA-GARCH process in R language
9.ARIMA + GARCH trading strategy for S & P500 stock index in R language