Refer to Chapter 7 of algorithm diagram for details. The original book was written in python, and I wrote it again in PHP, which was slightly improved
Test these three exercises in the book
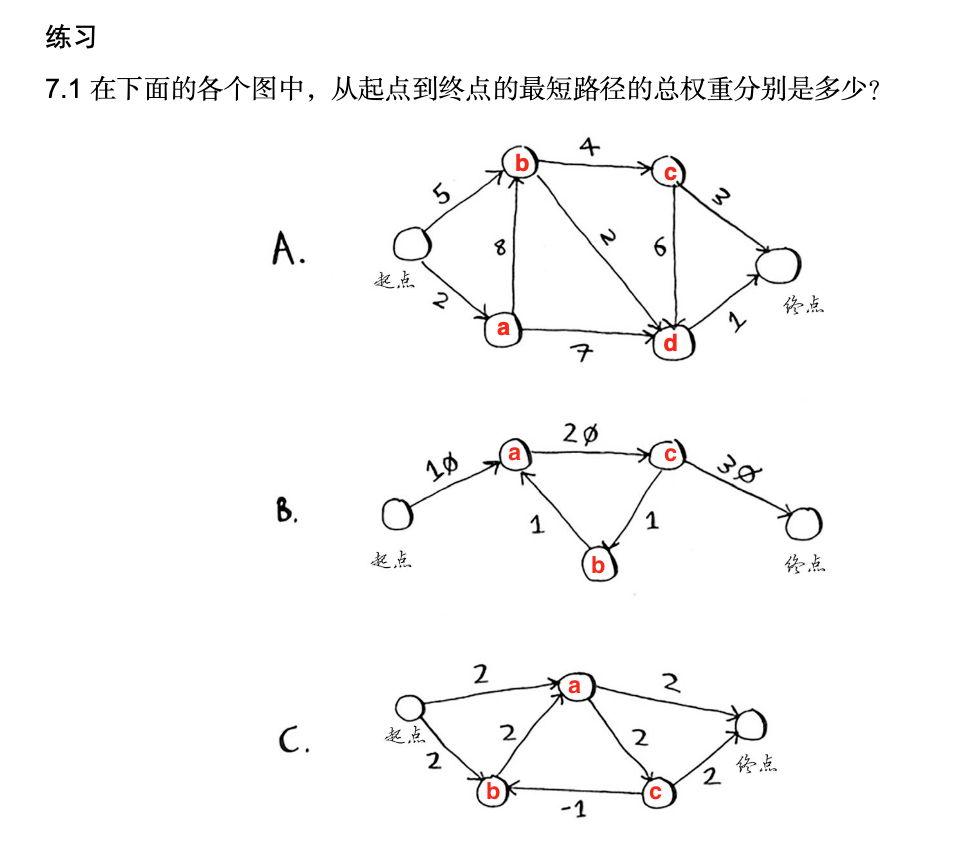
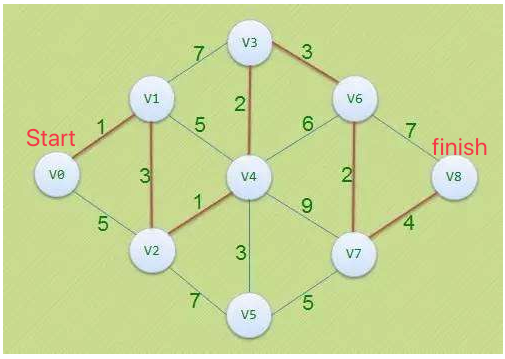
I found another "difficult" question on the Internet
Upper Code:
class ShortPath{
protected $graph=[];//A graph can be represented only by storing the neighbors corresponding to each node
protected $parents=[];//Save the parent relationship, and finally backtrack the shortest path through this array
protected $costs;//Cost from start to each node
protected $infinity=999999;//Use a large number to represent a positive infinity
protected $processed=[];//key of processed node
public function __construct($graph)
{
$this->graph=$graph;
//Initialize the parent array, that is, only the neighbors of start are known, that is, the parent of start
foreach ($this->graph['start'] as $k=>$v) {
$this->parents[$k]='start';
}
//Initialize the cost array, that is, only the cost of the neighbor node of start is known, and all other nodes are positive infinite
foreach ($this->graph as $k=>$v) {
if($k=='start'){
$this->costs=$this->graph['start'];
}elseif(empty($this->costs[$k])){
$this->costs[$k]=$this->infinity;
}
}
$this->costs['finish']=$this->infinity;
}
public function find(){
$nodeKey=$this->findLowestCostNode($this->costs);
while ($nodeKey){//As long as there are unprocessed nodes
$cost=$this->costs[$nodeKey];
$neighbors=$this->graph[$nodeKey] ?? [];//Take neighbors
//Traversing neighbors
foreach ($neighbors as $k=> $v) {
$newCost=$cost+$v;
if($this->costs[$k] > $newCost){
$this->costs[$k]=$newCost;//Update lower overhead
$this->parents[$k]=$nodeKey;
}
}
//Debug output
echo 'Current node:' .$nodeKey . PHP_EOL;
echo 'Neighbours:' . PHP_EOL;
print_r($neighbors);
echo 'Expenses:' . PHP_EOL;
print_r($this->costs);
//Now that all neighbors of the node have been processed, mark the node as processed
$this->processed[]=$nodeKey;
//Find the next node to be processed
$nodeKey=$this->findLowestCostNode();
}
$this->showResult();
}
//Find the shortest one among the unprocessed nodes
protected function findLowestCostNode(){
$lowestCost=$this->infinity;//Set positive infinity here so that when you first enter the loop, it must be larger than the first element
$lowestCostKey=false;//The key of the shortest path node to return
foreach ($this->costs as $k=>$v) {
if($v<$lowestCost && !in_array($k,$this->processed)){
$lowestCost=$v;
$lowestCostKey=$k;
}
}
return $lowestCostKey;
}
//Beautify display processing results
protected function showResult(){
$path=[];
$key='finish';
//From the end, find the parent and trace back the shortest route
while (isset($this->parents[$key])){
array_unshift($path,$key);
$key=$this->parents[$key];
}
echo 'The shortest path length is:' . $this->costs['finish'] . PHP_EOL;
echo 'The route is:start->' . implode('->',$path) . PHP_EOL;
}
}
//Corresponding exercise A
$graph1=[
"start"=>[
"a"=>2,
"b"=>5,
],
"a"=>[
"b"=>8,
"d"=>7,
],
"b"=>[
"c"=>4,
"d"=>2,
],
"c"=>[
"finish"=>3,
"d"=>6
],
"d"=>[
"finish"=>1
]
];
//Corresponding Exercise B
$graph2=[
"start"=>[
"a"=>10,
],
"a"=>[
"c"=>20,
],
"b"=>[
"a"=>1,
],
"c"=>[
"b"=>1,
"finish"=>30,
],
];
//Corresponding exercise C. It can be seen that the algorithm is not suitable for the case with negative weight edges
$graph3=[
"start"=>[
"a"=>2,
"b"=>2,
],
"a"=>[
"c"=>2,
"finish"=>2
],
"b"=>[
"a"=>2,
],
"c"=>[
"b"=>-100,
"finish"=>2,
],
];
//Corresponding to the last question, change v0 in the figure to start and v8 to finish
$graph4=[
"start"=>[
"v1"=>1,
"v2"=>5,
],
"v1"=>[
"start"=>1,
"v2"=>3,
"v3"=>7,
"v4"=>5,
],
"v2"=>[
"start"=>5,
"v1"=>3,
"v4"=>1,
],
"v3"=>[
"v1"=>7,
"v2"=>2,
"v6"=>3,
],
"v4"=>[
"v1"=>5,
"v2"=>1,
"v3"=>2,
"v5"=>3,
"v6"=>6,
"v7"=>9,
],
"v5"=>[
"v2"=>6,
"v4"=>3,
"v7"=>5,
],
"v6"=>[
"v3"=>3,
"v4"=>6,
"v7"=>2,
"finish"=>7
],
"v7"=>[
"v4"=>9,
"v5"=>5,
"v6"=>2,
"finish"=>4
],
];
$obj=new ShortPath($graph4);
$obj->find();
Output of the last question

Finally, the pdf version of the book "algorithm diagram" is attached
Link: https://pan.baidu.com/s/1nditk7wayn7c9fz3ldngw password: ij0r

